存档:高通骁龙飞行套件¶
Snapdragon Flight 平台是一款高性能 CPU (飞行)控制器,配有两个机载摄像头。

警告
许多开发人员都表示,也许是因为缺乏文档或电路板上的底层软件存在问题,该电路板很难正常工作。如果您正在寻找一款高性能的 Linux (飞行)控制器,不妨考虑一下 Navio2 而不是
概述¶
"这款" Qualcomm® Snapdragon Flight™ 套件(开发人员版) 它的体积很小(58x40 毫米),但却拥有强大的 CPU 处理能力和两个板载摄像头。它包含 4 个运行 Linux(默认为 Ubuntu 14.04 Trusty)的 "Krait "ARM 内核和 3 个运行 QURT 实时操作系统的 "Hexagon "DSP 内核。此外,它还包括 Wi-Fi、蓝牙连接、载具级 GPS 和许多其他功能。
警告
由于 Intrinsyc 的一些不寻常的许可条款,我们无法分发 ArduPilot 的二进制文件(或任何使用高通库构建的程序)。因此,您必须自行构建固件: 高通骁龙飞行套件的构建 (Dev Wiki)。
规格¶
详细规格见 www.intrinsyc.com here (在简短的调查之后)。
片上系统:骁龙 801
处理器四核 2.26 GHz Krait
DSP:Hexagon DSP (QDSP6 V5A) - 801 MHz+256KL2 (运行飞行代码)
图形处理器:Qualcomm® Adreno™ 330 GPU
内存: 2GB LPDDR3 PoP @931 MHz
存储空间32GB eMMC 闪存
传感器
MPU:英维思 MPU-9250 9 轴传感器,3x3mm QFN
气压计博世 BMP280 气压传感器
光流:Sunny 模块 MD102A-200 上的 Omnivision OV7251
视频Liteon 模块 12P1BAD11 上的索尼 IMX135 (4k@30fps 使用 H.264 @ 将 3840×2160 视频采集到 SD 卡;100Mbits(1080p/60(带并行 FPV),720p FPV)。
GPS: Telit Jupiter SE868 V2 模块
电源
通过 APM 适配器将外部 2S-6S 电池的电压调节至 5VDC
接口/连接性
Wifi:Qualcomm® VIVE™ 1 流 802.11n/ac,带 MU-MIMO † 集成数字内核
BT/WiFi:通过 QCA6234 连接 BT 4.0 和 2G/5G WiFi
802.11n、2×2 MIMO,板载 2 个 uCOAX 连接器,用于连接外部天线
机载 uCOAX 连接器,用于连接外部 GPS patch 天线
CSR SiRFstarV @ 通过 UART 5Hz
一个 USB 3.0 OTG 端口(micro-A/B)
微型 SD 卡插槽
万向节连接器(PWB/GND/BLSP)
电调连接器(2W UART)
I2C
60 针高速 Samtec QSH-030-01-L-D-A-K 扩展连接器
2x BLSP(BAM 低速外设)
尺寸
重量?
PCB=57x40, PCB+ 连接器+摄像头=68x52
更多详情可查阅 Intrinsyc 商店.
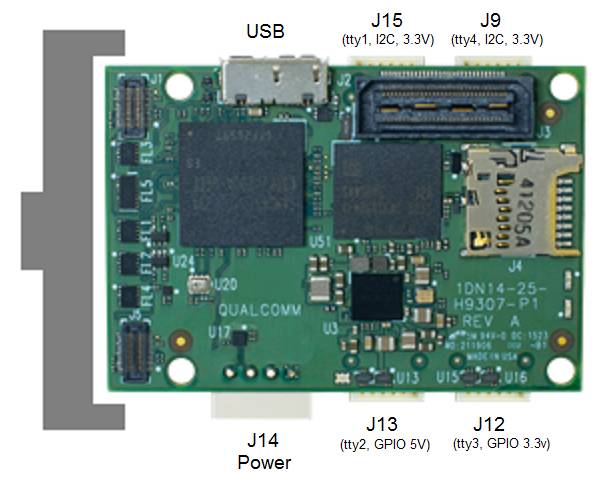
连接器针脚分配¶
高通 Flight 板有 4 个 DF13 6 针 UART 连接器。
警告
引脚布局与 Pixhawk 不同!
所有 UART 的引脚布局为
引脚1动力
引脚2:TX
引脚3:RX
引脚5:接地
这 4 个端口称为 /dev/tty-1, /dev/tty-2, /dev/tty-3 和 /dev/tty-4.第一个端口是最靠近 USB3 连接器的端口。从这里开始,端口按逆时针方向依次排列。因此 tty-2 是最靠近电源接口的端口。
"这款" 默认任务 的端口是:
/dev/tty-1:遥控输入(仅限 Spektrum 卫星)
/dev/tty-2:遥测数据为 57600
/dev/tty-3:RC 输出(见下文)
/dev/tty-4:全球定位系统
4 个端口中的 3 个端口提供 3.3V 电源。 引脚1而 /dev/tty-1 提供 5V 电源(注意 引脚6 与 Pixhawk 不同的是,它不接地)。您需要检查 GPS 是否可以使用 3.3V 电压供电。建议使用 uBlox GPS,不过也可以使用任何与 ArduPilot 兼容的串行 GPS。
无线网络¶
WLAN0、WLAN1(+BT 4.0):U.FL 连接器: Taoglas 胶粘天线(DigiKey)
J9 / GPS¶
| 针脚 | 信号 | 评论 |
|---|---|---|
| 1 | 3.3V | 输出 (3.3V) |
| 2 | UART2_TX | - |
| 3 | UART2_RX | 输入(3.3V) |
| 4 | I2C2_SDA | (3.3V) |
| 5 | 接地 | - |
| 6 | I2C2_SCL | (3.3V) |
J12 / 万向节总线¶
| 针脚 | 信号 | 评论 |
|---|---|---|
| 1 | 3.3V | - |
| 2 | UART8_TX | 输出 (3.3V) |
| 3 | UART8_RX | 输入(3.3V) |
| 4 | APQ_GPIO_47 | (3.3V) |
| 5 | 接地 | - |
| 6 | APQ_GPIO_48 | (3.3V) |
J13 / ESC 总线¶
| 针脚 | 信号 | 评论 |
|---|---|---|
| 1 | 5V | - |
| 2 | UART6_TX | 输出 (5V) |
| 3 | UART6_RX | 输入 (5V) |
| 4 | APQ_GPIO_29 | (5V) |
| 5 | 接地 | - |
| 6 | APQ_GPIO_30 | (5V) |
J14 / 电源¶
| 针脚 | 信号 | 评论 |
|---|---|---|
| 1 | 5V 直流电 | 电源输入 |
| 2 | 接地 | - |
| 3 | I2C3_SCL | (5V) |
| 4 | I2C3_SDA | (5V) |
J15 / 无线电接收器 / 传感器¶
| 针脚 | 信号 | 评论 |
|---|---|---|
| 1 | 3.3V | - |
| 2 | UART9_TX | 输出 |
| 3 | UART9_RX | 输入 |
| 4 | I2C9_SDA | - |
| 5 | 接地 | - |
| 6 | I2C9_SCL | - |
电调 PWM 输出¶
要向电调或舵机发送信号,需要使用 UART。默认设置是将 4 个 PWM 信号作为串行数据通过 UART 发送。 /dev/tty-3.
该固件 将读取 UART 串行数据流,并输出到所使用电路板的 PWM 输出端。例如,您可以使用 Pixracer 或 Pixhawk 电路板。该固件适用于任何兼容 ArduPilot 的电路板。
备注
高通公司/Intrinsyc 公司发布了一款电子调速器 但尚未测试是否可与 ArduPilot 一起使用。
记录¶
日志将显示在 /var/APM/logs 用于 QFLIGHT ARM 端口和 /usr/share/data/adsp/logs 的 QURT 端口。
您可以使用 FTP、Samba、SCP 或其他常用文件复制工具通过 WiFi 复制日志(板卡默认运行 Samba,因此您只需将日志目录添加到 Samba 配置文件中即可导出,然后从 Windows 拖放即可)。在 QFLIGHT 上,您还可以通过 MAVLink 下载日志。
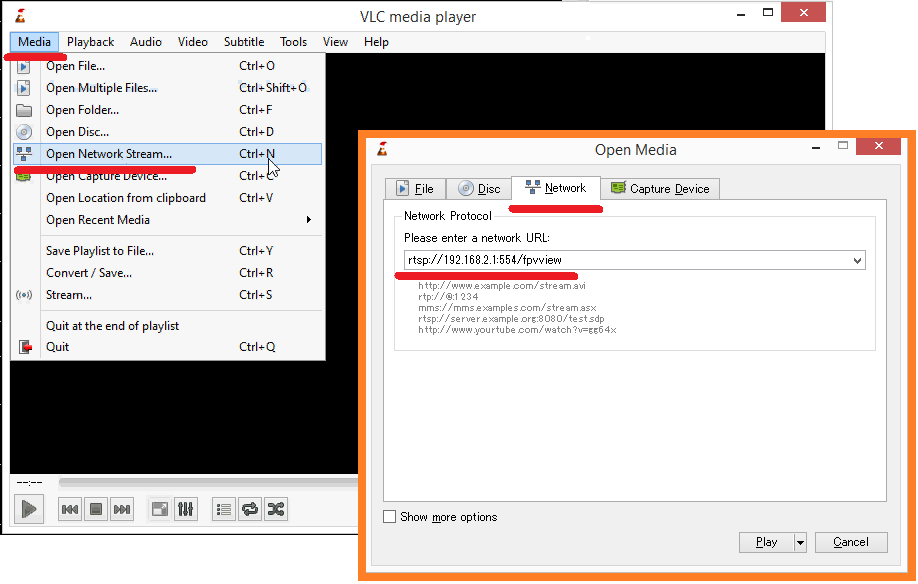
录制和显示实时视频¶
使用(飞行)控制器上的 qcamvid 应用程序,可以录制和查看两个摄像头中任何一个的实时视频。
其他信息¶
QURT 港口 (Github)
QFlight 端口 (Github)