与 Navio+ 相比的新功能
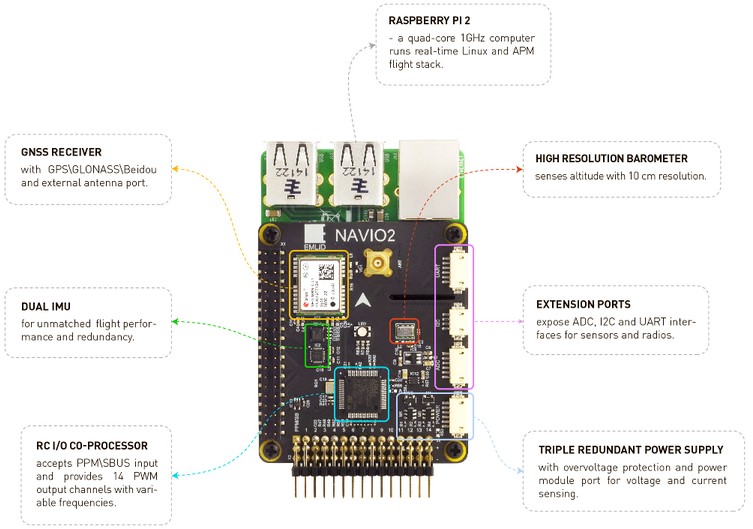
双 IMU。 Navio2 有两个 IMU 芯片,用于改善飞行体验和冗余。
改进 MS5611 性能。 MS5611 所连接的总线上其他芯片的交易可能会在转换过程中产生噪声。这就是为什么 MS5611 是 I2C 总线上唯一的传感器,以克服这一问题。
用微控制器取代 PCA9685 PWM 发生器。 先前版本的 Navio PWM 由 PCA9685 芯片生成。该芯片的主要局限是无法控制独立通道的频率。这导致电机和舵机在不同频率下工作时出现问题。为了解决这个问题,我们使用了微控制器。它可以分组设置输出通道的频率。
PPM/SBUS 解码由微控制器完成,而不是 DMA。 Navio+ 使用 DMA 对 PPM 信号进行采样,这对系统资源的消耗相当大。在 Navio2 上,微控制器处理 PPM/SBUS 采样,将 Raspberry Pi 2 的处理器内核留给您执行任务。
AUX SPI。 Navio2 是第一个在 Raspberry Pi 上使用 AUX SPI 控制器的 HAT。使用两个 SPI 控制器可以更有效地分配传感器。
ADC 端口。 由于 ADC 通道只能在电路板底部的焊盘上使用,因此在 Navio+ 上使用额外的 ADC 通道对用户来说并不方便。在 Navio2 上,这些通道可以通过 DF13 端口轻松访问。
更好地集成 Linux。 PWM、ADC、SBUS 和 PPM 均集成在 Linux sysfs 中,可方便地使用任何编程语言进行访问。未来还将进行更深入的集成。