归档:物体回避¶
漫游车支持两种形式的物体避让,可分别或同时启用
躲避¶
警告
闪避仅适用于前向测距仪(声纳/激光雷达)。360 度激光雷达不能用于这种躲避方法
一个或两个测距仪应朝向前方安装,如图所示。 测距仪维基页面
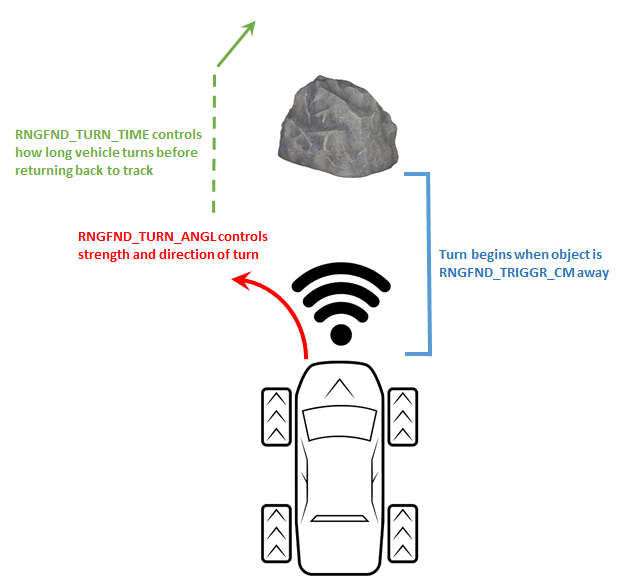
RNGFND_TRIGGR_CM 指定载具开始转弯的距离(厘米)。例如,100 表示载具在距离障碍物 1 米处开始转弯。如果希望载具停止而不是绕过障碍物,则将该值设为 0。
RNGFND_TURN_ANGL 控制转弯的方向和力度。较大的正值或负值(如 -450 或 450)会导致转弯达到载具的最大横向加速度(如 -450 或 450)。 ATC_TURN_MAX_G),而接近零的数值会导致平缓转弯。负值会导致载具左转,正值会导致右转。
RNGFND_TURN_TIME 控制物体消失后,载具继续转向的时间。
RNGFND_DEBOUNCE 指定需要多少个连续读数才能触发转向响应。数字越大,误报率越低,但也会增加响应的滞后性。
简单避让(停止)¶
这种避让方式试图在撞到物体之前让载具停下来。
照常 测距仪安装说明
如果使用普通激光雷达或声纳(即非 360 度激光雷达):
设置
RNGFNDx_ORIENT(例如 RNGFND1_ORIENT )设为 "0"(正向激光雷达)和 "4"(反向激光雷达)。设置
PRX_TYPE= "4",可将测距仪用作 "近距离传感器"。设置 AVOID_ENABLE 调至 "7",以启用使用近距离传感器(和栅栏)的避让功能