存档:连接无线电接收器 (APM2)¶
警告
存档
与 ArduPilot 一起使用的 APM2.x 已经报废。本文供现有用户使用。
本主题介绍如何将 RC 输入连接到 APM2.x 控制板。
连接接收器¶
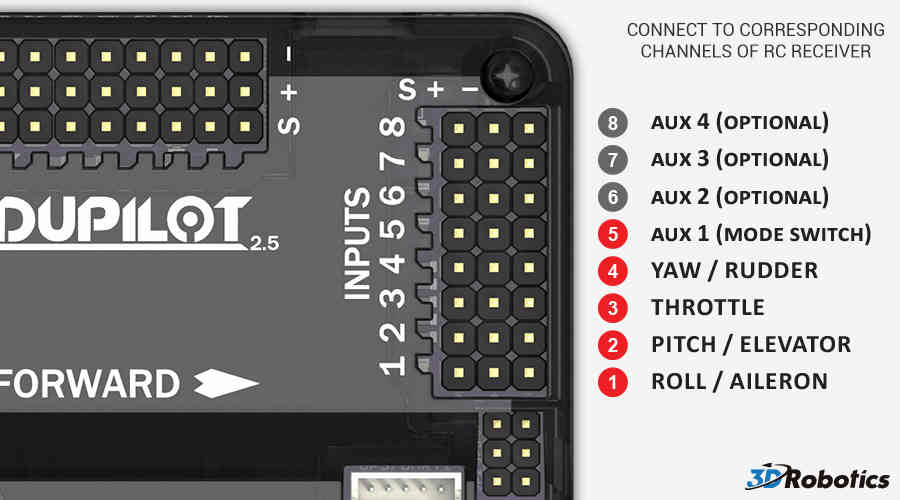
将遥控接收器的 "S"(信号)引脚连接至 APM 输入端的 "S "引脚,使用一个(至少 5 针)连接线。 跳线(6 针对 6 针-单个母头-15 厘米).必须至少连接通道 1 ~ 5。通道 6 ~ 8 为可选项。

遥控接收机需要电源。通常情况下,在 APM 输入和接收机的一个通道输出之间使用一个 2 线或 3 线连接器。参见 APM 电源详细信息 限制和重要警告。
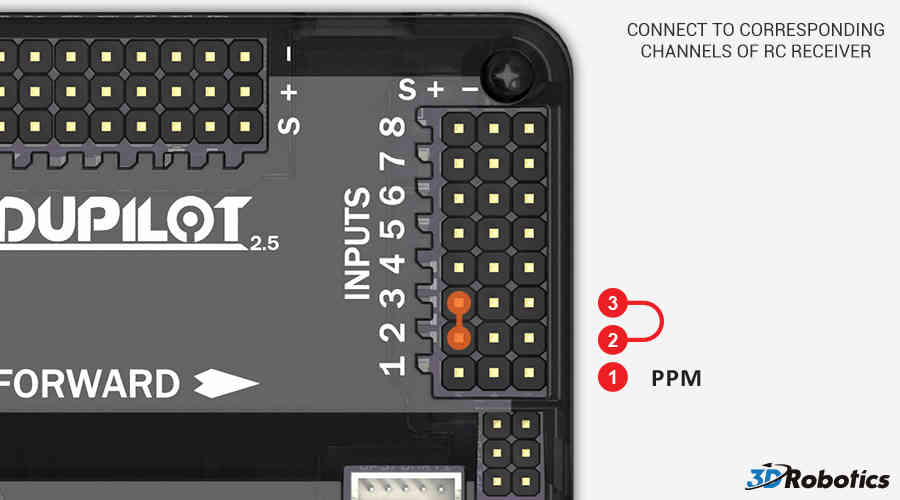
连接 PPM Sum 接收器¶
PPM 接收机通过一个端口传输上述所有通道信息(有些接收机会传输额外的通道,例如 FrSky D8RSP 接收机输出 7 个 PWM 通道,而在 CPPM 模式下则输出 8 个通道)。
在 APM2 上,您可以通过将一个 跳远选手 通道 2 和通道 3 的 RC 输入(仅信号引脚)。接收器输入的 PPM 信号应输入通道 1。
如果在使用 PPM 时需要重新安排频道顺序,而发射机又无法做到这一点,可以使用 RCMAP 高级参数来实现。了解更多 这里.