存档:为 APM2 供电¶
警告
存档
与 ArduPilot 一起使用的 APM2.x 已经报废。本文供现有用户使用。
本文介绍了 APM2.x 板的供电选项以及连接电源轨的要求。
概述¶
与其他计算机一样,APM 也需要一个电压稳定、电流充足的电源。
3DR 提供 3DR 电源模块 可在 5.37 伏电压下提供 2.25A 电流。该模块旨在转换主飞行电池(最大 18 伏)的电能。该模块可为 APM 和包括遥控接收机(不含舵机)在内的低功率无线电设备提供充足的电力。您的遥控接收机可由任何 APM 输入(+5V 和地)供电。这通常是通过在 APM 输入和遥控无线电的一个输出通道之间连接一条 2 线或 3 线电缆来实现的。
如果使用传统旋翼飞行器或相机云台所需的舵机,则需要为舵机提供额外的专用电源。APM 用于 控制权 舵机,而不是给它们供电。
以下各节将介绍 APM 电源电路(您需要了解这一点,以便为 APM 设计电源或提供额外电源),以及为 APM 和连接组件供电的选项。
APM 电源电路¶
电路板上的正极电路有两个 "面"。每一面都有正极导轨,可用于输入电源或向外围设备分配电源。在标有 "+"的三组引脚(输出、输入、模拟)中,中间一排引脚被称为 "正轨"。这意味着所有 "+"引脚的基极都连接在一起,因此它们代表一条电气路径。输入组和模拟组的正轨连接在一起。因此,我们有两个独立的正极电路,一个在输出端,另一个由输入/模拟组成。
电路板上的所有元件都从这些导轨上的不同点获取电源,因此电路板的两个 "侧 "都必须接收 +5V(符合以下规格),才能正常工作。
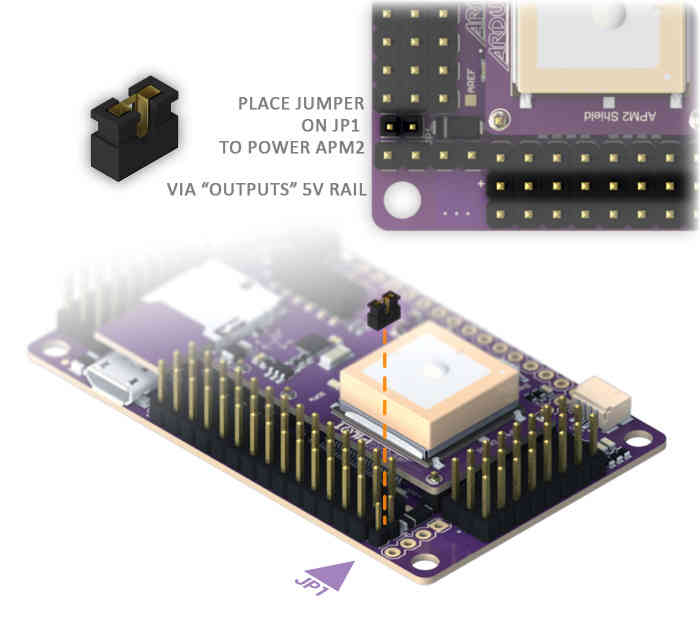
通过将 JP1 放在电路板上的相应位置,可以将这些正极导轨连接在一起。这样就连接了所有的正极导轨,并为电路板的两侧提供了电源,从而可以将低电平电源分配给外围传感器和设备:这样,低电平电源就可以通过电源导轨分配给外围传感器和设备:3DR 无线电设备、声纳、遥控 Rx 等。
使用电源模块时,电路路径如下:
从电源模块的连接处,负极线与整个电路板共享的负极轨相连,与 JP1 无关。
正电压进入一个 T 型结点,左侧是通过 JP1 连接到输出端正轨的路径。右边是过压、过流、反极性保护(500mA 触发保护机制和 6V 齐纳二极管)。通过齐纳二极管的副作用是 0.37V 的损耗,因此输入电压应提高 0.37V,以考虑到这一点。从这里开始,正电压进入输入和模拟电路的正轨。除遥控接收器外,输入端不应为任何其他设备供电。
舵机等大电流负载应由输出端的电源轨(正负极)供电。您必须使用适当的稳压器直接为输出端电源轨供电,所有伺服电源线都将连接到这些相同的电源轨上(如果是相机云台,信号线可连接到模拟 "S "引脚上)。由于在这种情况下取消了 JP1,因此电路板的另一侧需要直接为其电源轨供电。
为电路板供电的其他方法¶
如果使用 3DR 电源模块,请在此处查看说明: 使用 3DR 电源模块
警告
在任何情况下都不得尝试从模拟输入连接器获取伺服电源。
警告
您可以通过 A0 - A11 I/O 连接器 "控制 "A9、A10 和 A11 的舵机,但必须单独运行舵机电源。
A0 - A11 I/O 连接器无法为舵机提供足够的电源。
I/O 连接器的 A9、A10 和 A11 预先接线至正确的数字输出,用作伺服控制线。
在使用伺服系统时,必须确保没有将其与 APM 板背面的焊盘重新分配为模拟使用。
电源要求的非技术性说明¶
下面的说明只是对上述信息的补充和补充。
APM 2.5/2.6 电路板有两个独立的电源电路,可通过各种方法轻松供电。
熔断器电源电路提供主电路板和一般 I/O 电源:(不能为舵机供电)。
其他电源电路用于输出连接器电源轨:(可为舵机供电)。
跳线 JP 1 决定两个电源电路是连接还是分离。
如果取下 JP1,输出连接器上的电源轨将 "浮动",并可用于分配电源。
但如果移除 JP1,则 OUTPUT 连接器不能用于为 APM 板供电。
可以通过电源模块连接器、输出或输入连接器为 APM 板供电。
通常 APM 2.5/2.6 "电源模块 "用于提供主 APM 2.5 板和一般 I/O 电源。
另外,主电路板电源可由一个电调或外部 BEC 提供。
如果使用伺服器,则需要补充电源。
一般情况下,为电路板提供一个电源,为舵机提供一个或多个附加电源。
但如果使用足够大的外置 BEC,则可以通过输出连接器为两个电路供电。
只有输出连接器可以为舵机供电,因为其他电路已熔断。
地址连接器有时用于提供伺服信号,但伺服电源必须来自其他地方。
APM 板和舵机的供电方式决定了 JP1 是否安装。
(两个电源电路是分开的还是连接的)。
所有可能的配置详见下文。
使用类型将决定哪些选项可用。
Copter 可通过电源模块或 UBEC 或其中一个电调的 BEC 为 APM 供电,也可通过 UBEC 或其他电调的 BEC 为舵机供电。
飞机可以通过电源模块为 APM 供电,通过飞行电机电调或单独的 UBEC 为 BEC 供电,如果舵机足够大,还可以通过单独的 UBEC 或飞行电机 BEC 为舵机供电。
Rover 可以通过电源模块为 APM 供电,通过驱动电机的电调或单独的 UBEC 为 BEC 供电,如果转向伺服器足够大,还可以通过单独的 UBEC 或驱动电机的 BEC 供电。
电源轨连接要求(JP1 已安装)¶
警告
连接电源时不要超过 Abs MAX 输入电压,否则会损坏电路板。
警告
当输入电压处于范围的高端(接近 Abs Max)时连接 USB 可能会损坏电路板。请在连接 USB 前断开电池,或测试输入电压,使其在规定范围内。
电源选项 |
名义 |
Abs MAX |
JP1 状态 |
电源接通输出 PWM 连接器 |
5.37V +-0.5 |
6V |
JP1 已连接 |
开机输入 PWM 连接器 |
5.00V +-0.25 |
5.5V |
JP1 已连接 |
无电源模块,无舵机,由电调的 BEC 供电¶
如果您没有电源模块,也不使用舵机。
确保安装了 JP1,并通过电调的 BEC 提供必要的电源。
将电调的 BEC 电源线和接地线连接到 APM 输出连接器的一对电源和接地引脚上。
将 BEC 电源引线夹在其余 3 个电线连接器上。
确保电调的信号线连接到相应的 APM 输出连接器信号针脚上。
您必须确保电调的 BEC 具有足够的功率能力(至少 2 安培)。
大多数 20 安培或更高的电调都有 2 安培的 BEC。
无电源模块,但使用舵机和大功率外部 BEC¶
如果您没有电源模块而使用舵机,可以使用大功率外部 BEC。
确保已安装 JP1,并通过高功率外部 BEC(5 至 10 安培或更高)提供必要的电源。
BEC 功率 必须 APM 输出连接器的一对针脚。
警告
- 夹住电调 BEC 上的所有电源线(它们会发生冲突)。
外部 BEC)。
您的舵机将决定所需的 BEC 大小。
至少应预留 2 或 3 安培的额外电流,以便为 APM 和接收器供电,并防止出现断电现象。
驱动每个伺服的所有正电源必须来自输出连接器。
即使伺服信号线连接到 ADDRESS 连接器上也是如此。
该选项要求您负责提供足够的电能,以防止停电。
没有电源模块,但使用舵机和来自电调的多个 BEC(每个舵机一个 BEC)。¶
如果您没有电源模块而使用舵机,您可以使用电调的多个 BEC。
确保已安装 JP1,并将一根带电源线的电调信号线插入输出接口。
从其余的电调信号线连接器上拆下电源线和地线。
将每个电调的信号线连接器插入输出连接器上的相应针脚。
您可以对其进行热缩处理,或将其插入适合您的旋翼飞行器的多线连接器。
将剩余的 BEC 电源线和接地线中的一对分别连接到每个舵机的电源线和接地线上。
夹住或热缩剩余的多余 BEC 电源和接地引线。
一个电调的 BEC 电源 必须 APM 输出连接器的一对引脚。
只将舵机的信号输入线插入相应的输出或地址连接器针脚。
电调的 BEC 至少应为 2 安培。
电调的 BEC 接地与电池和内部信号接地是共用的,因此舵机可以这样接地。
电源轨未连接要求(JP1 未安装)¶
警告
连接电源时不要超过 Abs MAX 输入电压,否则会损坏电路板。
警告
当输入电压处于范围的高端(接近 Abs Max)时连接 USB 可能会损坏电路板。请在连接 USB 前断开电池,或测试输入电压,使其在规定范围内。
电源选项 |
名义 |
Abs MAX |
JP1 状态 |
电源接通输出 PWM 连接器 |
5.00V +-0.5 |
6V |
JP1 打开 |
开机输入 PWM 连接器 |
5.00V +-0.25 |
5.5V |
JP1 打开 |
电源模块和无伺服系统¶
如果您有电源模块且不使用舵机。
确保 JP1 未安装。
通过连接至 APM 电源模块连接器的电源模块提供必要的电源。
将电调连接到输出连接器时,请将 BEC 电源线夹在每个电调的 3 线连接器上。
或者只将电调的信号线连接到输出接口。
电源模块和使用外部 BEC 电源的伺服系统¶
如果您有电源模块和外部 BEC,并且正在使用舵机。
确保 JP1 未安装
通过连接至电源模块连接器的电源模块为 APM 板和接收器供电。
在输出连接器的一对电源引脚上连接一个为舵机提供足够电力的外部 BEC。
将电调连接到输出连接器时,请将 BEC 电源线夹在每个电调的 3 线连接器上。
或者只将电调信号线连接至输出连接器。
电源模块和使用来自一个电调的 BEC 电源的舵机¶
如果有电源模块且使用舵机,则移除 JP1。
通过连接至 APM 电源模块连接器的电源模块为 APM 和接收器供电。
单个电调的 BEC 必须为所有舵机提供足够的电力。
将电调连接到输出连接器时,除一个电调连接器外,其余所有电调连接器上的 BEC 电源线都要夹住。
或者只将电调信号线连接到除一个电调之外的所有电调的输出连接器上。
在电调上,将所有 3 根电线连接到输出连接器。
无电源模块,使用由两个电调提供 BEC 电源的舵机¶
如果没有电源模块且使用舵机,则移除 JP1。
通过连接至 APM 输入连接器电源引脚的一对 ESC-BEC 电源线为 APM 和接收器供电。
同时将另一对电调电源线连接到输出连接器上。
单个电调的 BEC 必须为所有舵机提供足够的电力。
夹住其余电调的信号电源线。
将所有电调信号线连接到相应的输出连接器针脚上。
APM 电源接线示例¶
警告
连接电源时,请勿超过 Abs MAX 输入电压,否则会损坏电路板。
警告
当输入电压处于范围的高端(接近 Abs Max)时连接 USB 可能会损坏电路板。请在连接 USB 前断开电池,或测试输入电压,使其在规定范围内。
在工作台上,您可能会在设置和测试时通过 USB 电缆为电路板供电。但在飞机上,您需要使用机载电源系统为其供电,通常是通过电调或电源模块为锂聚合物电池供电。如果是多旋翼飞行器,则可以通过电源分配板 (PDB),将电子调速器 (ESC) 或电源模块的 5V 电压输出直接连接到电池。
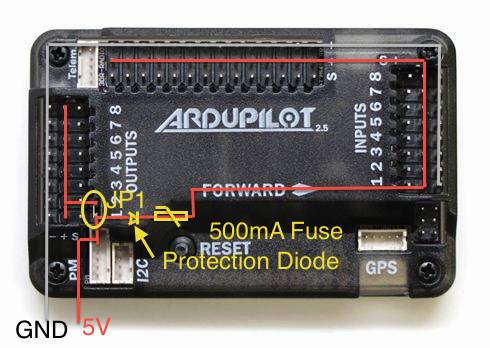
在下图中,红线和黑线是来自 PDB 的 5b m hV 电源线。您可以将它们插入 APM 2.5 输出侧 5V 和接地(中间和外侧)引脚排上的任意两个引脚。另一根线缆(在本例中为四旋翼飞行器的橙色和白色四线电缆)是通往 PDB 的信号线,APM 2.5 将使用这些线缆来指挥每个电调。
下图显示的是 APM 2;但这一概念适用于 APM 2.5。

APM 2.5 也可以由两个独立的电源供电,一个在输入端为遥控系统供电,另一个在输出端(舵机或电调)供电。这由 JP1 引脚上的跳线决定(见下文)。如果跳线接通(出厂默认值),则电路板由输出轨或 USB 供电。如果跳线断开,电路板由输入轨供电,但输出轨需要自己的电源。如果您想在飞机上使用两个独立的电源,一个为舵机供电,另一个为电子设备供电,则可以使用这种配置。理想的输入电压为 5.37v +/-0.0v,一般的电调可能无法提供。
警告
连接电源时,请勿超过 Abs MAX 输入电压,否则会损坏电路板。
在某些情况下,最好将输入电压设置为略高于中值(但低于最大值),以考虑到瞬间大电流时可能出现的电压下降。
APM2.5 本身消耗的电流相对较小(200ma 范围内),能够提供 300 - 500ma 电流的电源将提供足够的裕量。但是,如果舵机或其他耗电设备由同一电源驱动,则必须考虑这些设备的电源要求,并提供足够的裕量以防止灾难性的 "断电"。例如,单个数字舵机可轻松消耗 1-5 安培,具体取决于其大小和性能。(注:电调不消耗 APM 的电能)如果您遇到虚假重置或其他奇怪的行为,很可能是由于 APM 受到噪声干扰或电能不足造成的。与所有逻辑板一样,电源上的电机、舵机或其他大电流设备产生的电气噪音会导致不可预测的行为。
建议 功率过滤器 在这种情况下使用。
过短或过长的电源线、不良或老旧的连接器,或者 APM 电源的电流能力不足,都可能导致 "断电 "情况,从而导致无法预测的操作。这种情况在传统旋翼飞行器上尤为明显,因为在这种情况下,集体舵机可能会在短时间内消耗 3-20 安培的电流。电源必须能够适应这种情况,而不会出现电压下降或电压尖峰。高质量的开关型 BEC(例如 这些 或其中之一 这些根据总体电流要求,线性稳压器也是一种解决方案。不推荐使用线性稳压器,因为它们效率低,容易过热和因热引起故障。切勿将 APM2 直接连接到任何类型的电池上。
电源问题很常见,而且可能很隐蔽,令人沮丧。要一丝不苟。如果没有良好清洁的电源,任何(飞行)控制器或自动导航仪都是无用的,并可能存在危险。
下图显示的是 APM 2;但这一概念也适用于 APM 2.5/2.6。