基于 F4 (飞行)控制器的 SLCAN 访问¶
启用 SLCAN 后,(飞行)控制器可通过 PC 上的 USB 连接到 CANBUS。它允许对连接到 CANBUS 的设备进行查看、配置和软件更新。有两种不同的应用程序可使用 SLCAN 来修改 DroneCAN 设备参数:DroneCAN GUI 或Mission Planner地面站。但首先必须启用 SLCAN 接口。
备注
为降低 CPU 负载,上膛时禁止通过 COM 端口访问 SLCAN。请通过 MAVLink 使用 SLCAN。在任何情况下,MAVLink 访问通常都是首选。
启用 SLCAN¶
将(飞行)控制器连接到Mission Planner地面站。
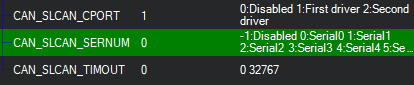
设置 can_slcan_cport = 1(如果尚未设置),或 =2(如果需要检查第二 CAN 总线(如果(飞行)控制器提供)并重新启动)。

正常连接至 Mission Planner 并导航至初始设置->可选硬件->UAVCAN(DroneCAN)。单击 SLCan Mode CAN1,使用驱动程序 1 连接的任何 DroneCAN 节点都将出现,现在可以对节点进行固件更新或参数更改。要返回正常的Mission Planner地面站操作,请将此选项卡保留 2 秒钟,然后重新连接Mission Planner地面站。

更改 DroneCAN 设备¶
启用 SLCAN 后,您可以使用 Mission Planner地面站 立即更改设备参数或更新固件。
DroneCAN GUI 工具 也可以使用,但所需的设置略有不同:
启用使用 DroneCAN GUI¶
将飞行(飞行)控制器连接至Mission Planner地面站。设置参数 can_slcan_cport = 1 ,如果尚未设置,则重新启动。
重新连接Mission Planner地面站并设置 can_slcan_sernum = 这将把输出导向(飞行)控制器的 SERIAL0 端口,通常是(飞行)控制器的 USB 连接。请确保 can_slcan_timout 参数为 0 以防止超时。
不要重启,在初始设置->可选硬件->UAVCAN(DroneCAN)中点击 SLCAN 模式 CAN1。现在打开 DroneCAN GUI 工具.
备注
在此模式下,您也可以使用 Mission Planner 的 DroneCAN 页面进行更改,但它不会作为 MAVLink 地面站正常连接。要重新连接Mission Planner地面站,您需要重新启动(飞行)控制器。