陆地模式¶
陆地模式可使旋翼飞行器直线下降,并具有这些功能:
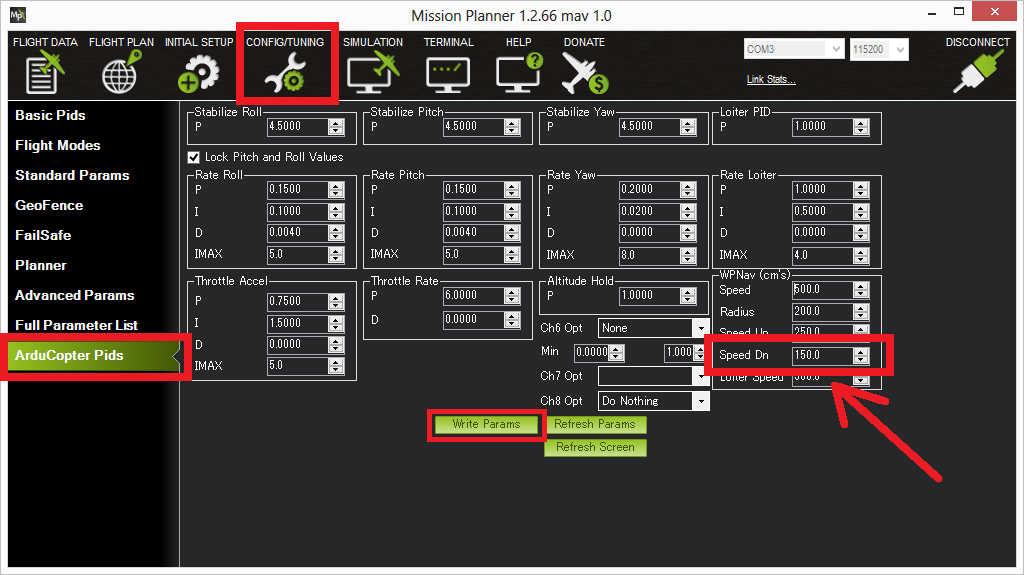
下降到 10 米(或直到声纳探测到旋翼飞行器下方有物体),使用常规的高度保持控制器,该控制器将按照在 WPNAV_SPEED_DN 该参数可在Mission Planner地面站的 "配置/调整 > 旋翼飞行器 Pids "屏幕上修改。
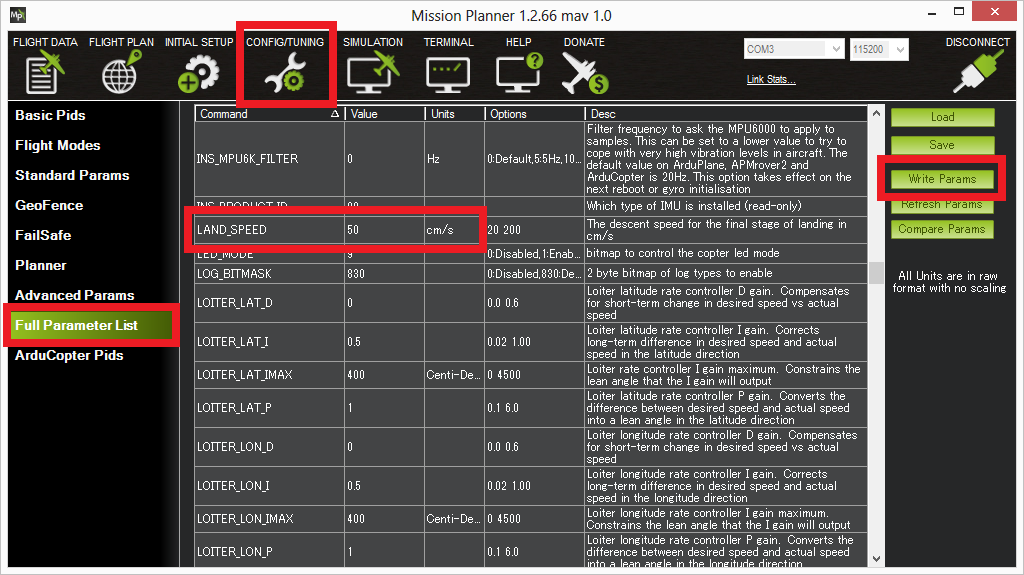
在 10 米以下时,旋翼飞行器应按照飞行手册中规定的速度下降。 LAND_SPEED 参数,默认为 50 厘米/秒。
到达地面后,如果飞行员将油门调到最小,旋翼飞行器将自动关闭电机并解除警报。
备注
如果垂直位置控制器命令发动机处于低空,其爬升率保持在 -20 厘米/秒和 +20 厘米/秒之间,并且在一秒钟内没有加速,则旋翼飞行器将识别为已着陆。它不会使用高度来决定是否关闭电机,但旋翼飞行器必须在原点高度以上 10 米以下,除非使用测距仪,在这种情况下,旋翼飞行器必须在距离地面 2 米以内。
备注
对于传统旋翼飞行器,上述着陆检测算法中的低电机检查改为检查集电极输出是否低于中间位置(由垂直位置控制器控制,即在下降过程中)。在电机联锁解除之前,转子仍可处于调速器速度。
备注
使用轮上重量(WoW)开关将增加着陆检测可接受的下降率和加速度计范围。在 LGR_WOW_PIN 未禁用的情况下,该功能都将启用。
如果在稳定下来并关闭螺旋桨之前,旋翼飞行器出现几次反弹或气球回升,请尝试降低螺旋桨。 LAND_SPEED 参数有点。
如果飞行器已锁定 GPS,着陆控制器将尝试控制其水平位置,但飞行员可以调整目标水平位置,就像在 "着陆 "模式下一样。
如果飞行器没有 GPS 锁定,水平控制将与稳定模式一样,这样飞行员就可以控制旋翼飞行器的滚动和俯仰倾角。
警告
在任何基于 Alt Hold 的模式下,包括:Alt Hold、Loiter、Auto、AutoLand 或 RTL:如果您的旋翼飞行器在接近地面或着陆时运行不稳定(以及如果任何自动着陆程序导致反弹或着陆后无法正确关闭发动机),则可能是(飞行)控制器的气压计(高度计)受到了旋翼飞行器螺旋桨冲刷地面产生的压力的影响。
这一点很容易验证,只要查看日志中的高度计读数,看看它在接近地面时是否会出现尖峰或振荡。
如果有这个问题,请将(飞行)控制器移出螺旋桨冲刷的影响范围,或用适当的通风外壳进行遮挡。
成功与否可以通过飞行测试和日志结果来验证。