在 APM 2.x 中使用外部指南针¶
警告
存档
与 ArduPilot 一起使用的 APM2.x 已经报废。本文供现有用户使用。
如果您遇到磁噪声影响 APM 2.5 板载指南针的问题,您可能需要改用外置指南针,将其安装在远离噪声源(如电机)的地方。本文将为您介绍具体方法。

分步说明¶
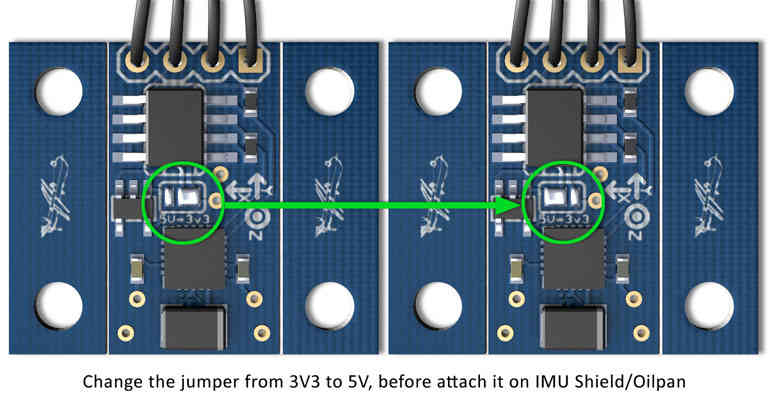
购买 HMC5883L 磁强计霹雳板.确保 3DR 板设置为使用 3.3 伏(APM 2.5 的 I2C 端口使用 3.3 伏,而不是 5 伏)。您必须修改 3DR 电路板,因为 3DR 出厂时设置的是 5 伏跳线,如下图所示。
如下图所示,剪断 APM 2.5 电路板中间的跳线。这将禁用连接电路板内部指南针的 SDA 线路,使其失效。
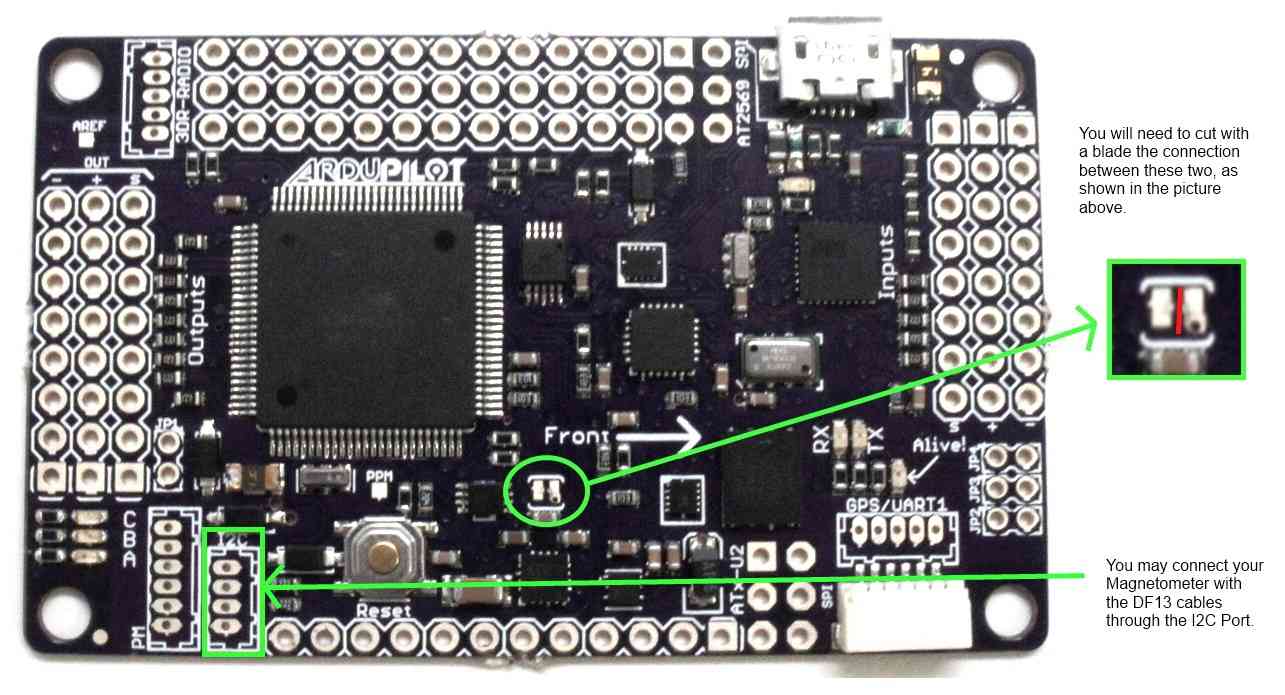
APM 2.5 I2C 连接器需要一个 4 针 DF13 连接器(如 这个).剪掉一根,然后将四根导线剥皮并镀锡。
将 DF13 的 4 根导线连接到指南针分解板。请注意,这些导线不是一对一的。DF13 连接器上的 1 号针脚不会连接到罗盘板的 1 号针脚。标准 3DR 电缆有一根红线和三根黑线。请相应替换导线颜色。按如下步骤焊接导线:
连接器末端的红线(+3.3 伏)连接到罗盘板上的 VCC(或 +3.3 伏)焊盘(位置参见板上的标签)。这是最接近 APM 2.5 板内部的导线。
红线(SCL)旁边的导线连接到罗盘板上的 SCL 焊盘。
红线(SDA)旁边的线连接到罗盘板上的 SDA 焊盘。
连接器末端的黑线(接地)连接罗盘板上的接地焊盘。这根线最靠近 APM 2.5 电路板的边缘。
将指南针板安装在四轮装置的顶板上。双面泡沫胶带非常适用。电路板的方向很重要。在下图中,我们将电路板安装在 "部件朝上、引脚朝前 "的位置。请注意电路板的安装方向--您需要根据这个方向修改软件,下一步将对此进行说明。
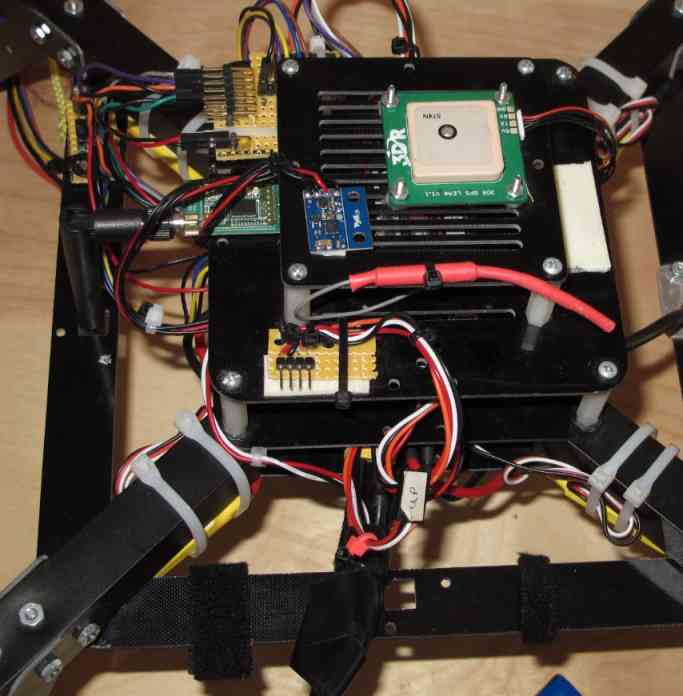
修改、编译并加载指南针板方向软件。您必须能够从 Arduino IDE 加载软件才能完成此步骤。在 "APM_Config.h "中,您会发现一条注释语句,如
//#define MAG_ORIENTATION AP_COMPASS_COMPOENTS_DOWN_PINS_FORWARD例如,对于上图所示的方向,你可以在上面注释的语句下面添加以下语句,如下所示:
#define MAG_ORIENTATION AP_COMPASS_COMPONENTS_UP_PINS_FORWARD您可以找到以下所有可能的方向列表
Mag_orientation中的 AP_Compass_HMC5843.h 库,包括 3DR 和 Sparkfun 电路板的方向。如果是第一次从集成开发环境加载软件,请确保以下语句未被注释:
#define CONFIG_APM_HARDWARE APM_HARDWARE_APM2保存、编译和上传修改后的软件
测试指南针板,使用稳定的指南针体验飞行乐趣!
(本条目由 Lloyd DeForrest 提供)