存档:APM2.x 接线快速入门¶
警告
存档
与 ArduPilot 一起使用的 APM2.x 已经报废。本文供现有用户使用。
本文将介绍在使用 APM2.x 飞行控制器.添加其他硬件的说明载于 可选硬件.
概述¶
将遥控飞机变为无人机,基本上只需在遥控接收器和飞机舵机之间安装一个(飞行)控制器,这样(飞行)控制器就能接管控制权。
我们的方法是将遥控接收器的母对母线插入 APM2 的输入端,然后将舵机(以及电动飞机的电机控制器)插入 APM2 的输出端。
您需要什么?
至少 5 通道遥控装置。强烈建议使用 7 通道或更多
用于每个通道的母头对母头电缆。 这些 没问题。
对于 APM2.0,您需要一个电源。对于电动飞机,这通常是电调。对于燃气/硝基动力飞机,无线电需要自己的电池/BEC。ArduPilot Mega 通常从遥控系统获取电源。
对于 APM2.5,您可以使用随附的 APM 电源模块供电。
警告
您仍然需要电调或 BEC 为舵机供电
.
备注
您也可以通过 USB 电缆为 APM 2 供电。不过,这不会为遥控输出引脚供电,因此如果您想在工作台上测试 APM 2 时看到舵机移动,则需要将电池(通过电调)连接到其中一个输出通道。同时连接电调和 USB 电缆也没有问题。
接线图示例¶
带 APM 的 Bixler 飞机接线图示例
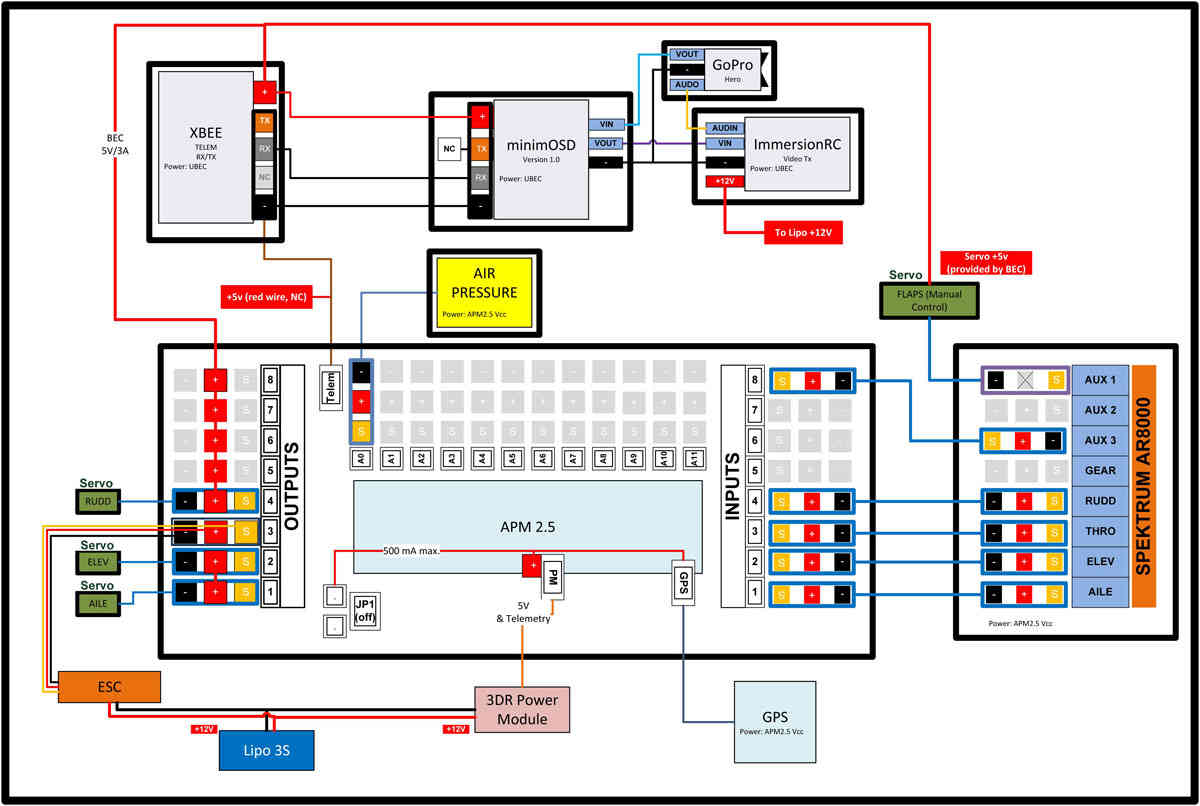
带 APM 的 aBixler 飞机接线图示例¶
输入¶
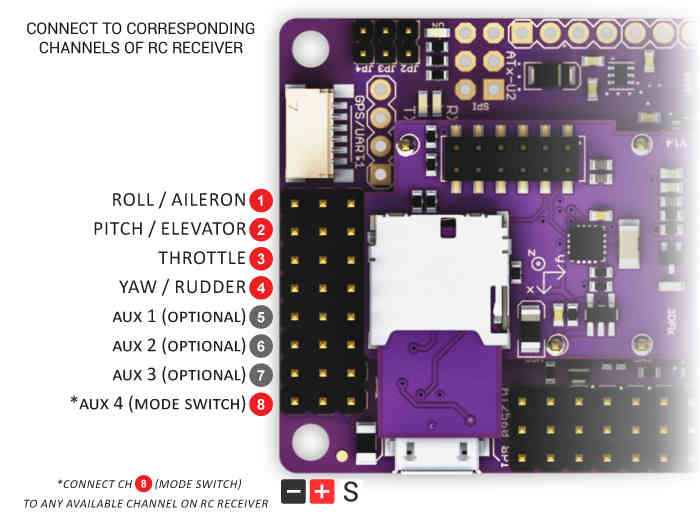
按照上图所示顺序,用母对母电缆将遥控接收器连接至 APM2 的输入端。您希望 APM 控制的每个通道都应连接到 APM 板上的输入端。通常情况下,模式开关(APM 输入 8,用于 !Plane)连接到您已分配给遥控发射机上三档拨动开关的任何遥控接收机通道(对于大多数人来说,就是通道 5)。
备注
这些说明适用于飞机。Copter 的模式开关指向 APM 输入 5,而不是输入 8
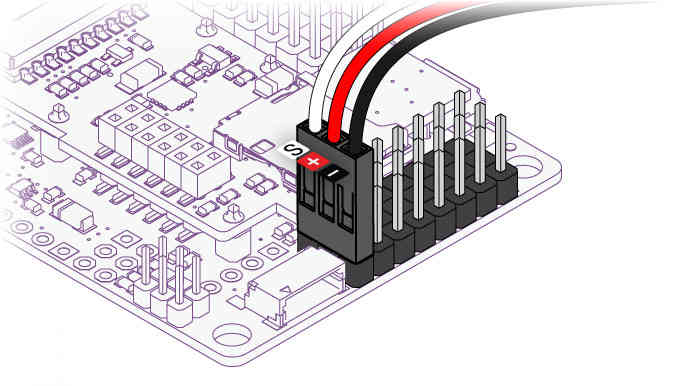
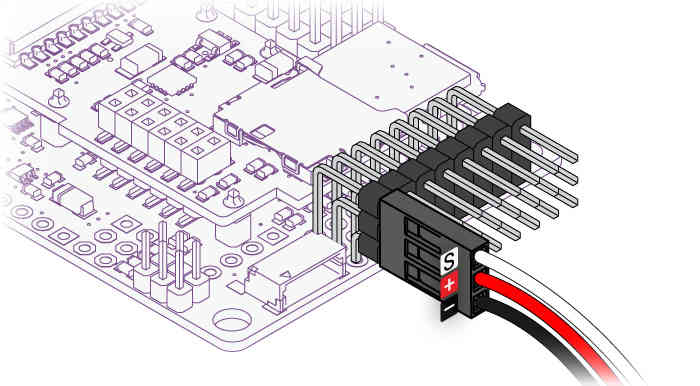
每个连接器的接地(黑色)面应位于外侧,最靠近电路板边缘,如图所示,可使用直角或弯角连接器:
另见 连接无线电接收器.
备注
还支持升降舵(副翼/升降舵组合,用于飞行翼),只需将它们连接到前两个通道,就像连接遥控接收器一样。您将 告诉 APM 进行升降舵混合 在Mission Planner地面站设置过程中。
如果您驾驶的是 V 型尾翼,请参阅
VTAIL_OUTPUT选项中的 伺服设置文档.
重新分配遥控发射机杆通道:¶
虽然默认的普通发射杆配置通常是最好的,但 Plane 允许您重新配置它们。
将遥控发射杆重新分配到默认频道以外的频道:
将 APM 的 USB 端口连接到计算机,然后启动 Mission Planner 并选择右上角的 "连接 "按钮。
选择 "配置 "选项卡,然后选择 "高级参数 "和 "高级参数列表"。
向下滚动到 "RCMAP_ROLL、RCMAP_PITCH、RCMAP_THROTTLE 和 RCMAP_YAW "参数。
通过这些功能,您可以直接为每个主要飞行功能指定无线电通道(1-8)。
当您的飞行发射机有不寻常的频道分配时,这很有用。
或不便于在发射机上重新分配信道
有关这些参数的更多信息,请参见 在 RCMAP 参数部分.
输出¶
如下图所示,将舵机和其他希望 APM 控制的设备插入匹配的输出连接器。
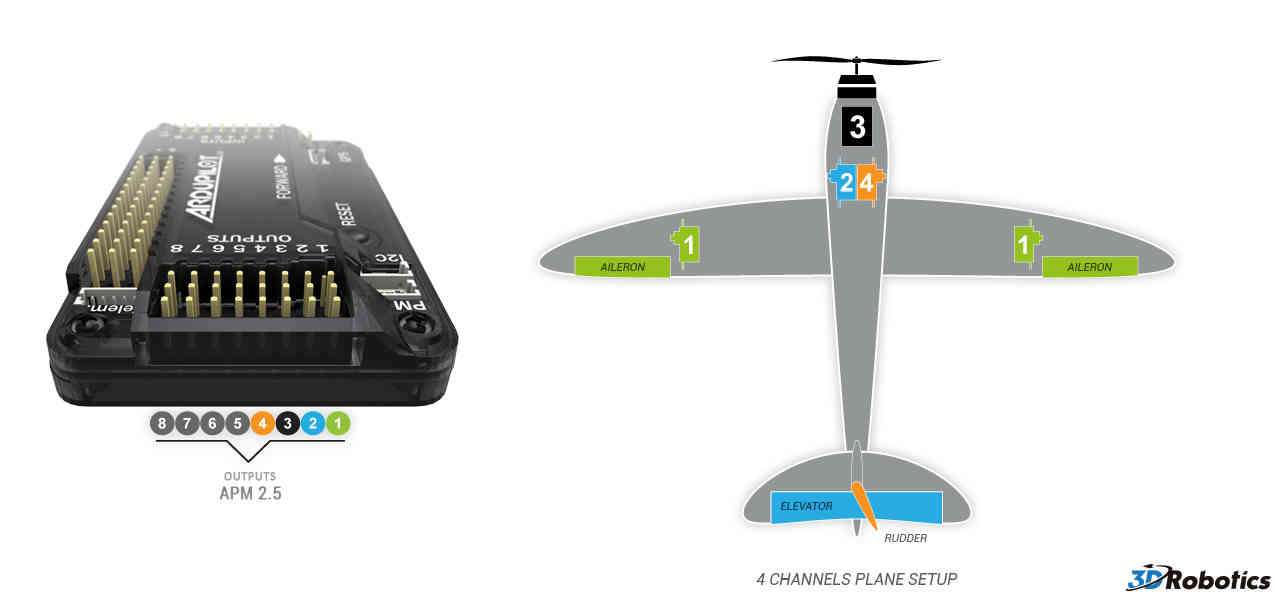
四通道设置
副翼
电梯
节流阀/电门
舵
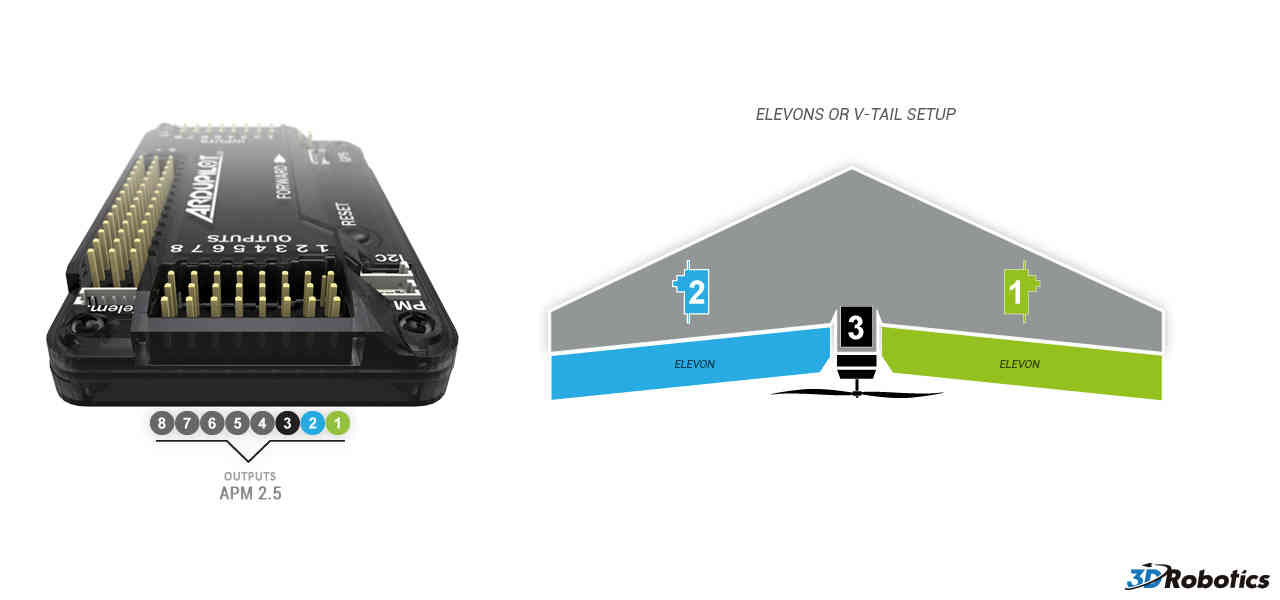
升降舵设置。在此阶段,哪个通道插入哪个升降器并不重要。如有需要,稍后可以将它们互换:
右舷升降舵
左舷升降舵
节流阀/电门
为飞机提供动力¶
为 APM2.x 供电的最简单方法是使用 3DR 电源模块 使用锂电池。
电源模块无法为舵机和其他外围设备供电。有关更多信息/替代方案,请参阅 为 APM2 供电.
电源输入¶
单电源
电源选项 |
名义 |
Abs MAX |
JP1 状态 |
电源接通输出 PWM 连接器 |
5.37V +-0.5 |
6V |
JP1 已连接 |
双路供电
电源选项 |
名义 |
Abs MAX |
JP1 状态 |
电源接通输出 PWM 连接器 |
5.00V +-0.5 |
6V |
JP1 打开 |
开机输入 PWM 连接器 |
5.00V +-0.25 |
5.5V |
JP1 打开 |
备注
如果 JP1 打开,则输入 PWM 和输出 PWM 都需要单独供电。
警告
连接电源时,请勿超过 Abs MAX 输入电压,否则会损坏电路板。
警告
输入电压过高(接近 Abs Max)时连接 USB 可能会损坏电路板。请在连接 USB 前断开电池,或测试输入电压,使其在正常规定范围内。
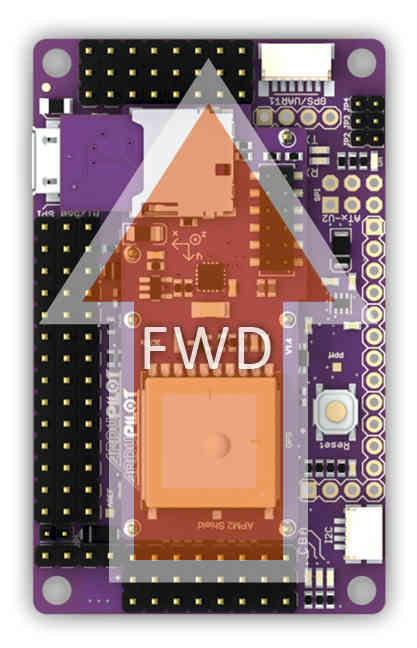
在飞机上安装¶
将 APM 安装到飞机上时,正确的朝向非常重要。GPS 连接器应朝前,舵机电缆朝后。电路板还必须右侧朝上,IMU 屏蔽在顶部。就像这样(注:屏蔽罩底部也有一个指向前方的小箭头,以防在现场需要提醒):
在飞机上安装 APM 时,必须确保其安装牢固,在飞行中不会移动。当飞机处于飞行方向时,它还应尽可能接近水平。理想情况下,应尽可能使其靠近重心(这是振动最小的地方),并用泡沫胶带将其安装在坚固的平台上。
连接 GPS 模块¶
GPS 模块可为自动飞行提供更强的定位功能。按照以下步骤将 GPS 连接到(飞行)控制器。
带机载指南针的 3DR GPS uBlox¶
带板载指南针的 3DR GPS uBlox 可与 APM 2.5(外置指南针)一起使用。它可以自由地将 GPS 设备放置在最佳位置,而不受 APM 位置的影响,从而增强了罗盘性能。将 GPS 放置在飞机外侧,视野开阔,尽可能远离发动机和电调,箭头朝前。

使用 GPS 随附的两条电缆将 GPS 模块连接到 APM 2.6,如下图所示。
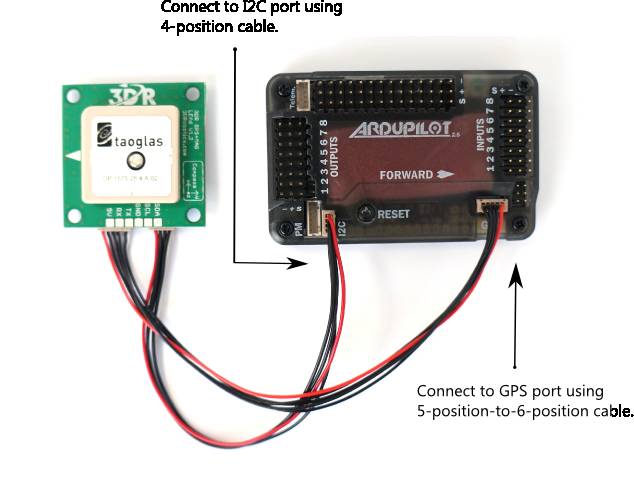
带板载指南针的 3DR GPS uBlox 包含两条连接器电缆:一条 4 位电缆和一条 5 位到 6 位电缆。要将 GPS 模块连接到 APM 2.6,请使用 5 位到 6 位电缆将 GPS 连接到 APM GPS 端口;使用 4 位电缆将 GPS 连接到 APM I2C 端口。
3DR GPS uBlox 不带机载指南针¶
不带机载指南针的 3DR GPS uBlox 适用于 APM 2.5。要安装不带指南针的 GPS 模块,请将其安装在飞机外侧能清楚看到天空的位置,然后使用 5 位到 6 位连接器电缆连接到 APM 2.5 GPS 端口。

安装 GPS 模块的提示¶
只要方形天线朝上,GPS 模块的方向并不重要
最好将 GPS 安装在尽可能远离无线电发射设备(如遥测或视频发射机)的地方。
理想情况下,GPS 模块可以清晰地看到天空。飞机顶部就是一个不错的选择。
下面是将 APM(和 GPS 模块)安装到 EasyStar 的一个示例,使用的是 3D 机器人电子底盘 为 HobbyKing Bixler.
底盘

已安装设备:
