无刷 PWM 云台¶
许多摄像机云台可接受 PWM 输入或 SBUS 输入,用于控制滚动、俯仰和偏航角度。本页介绍 ArduPilot 控制这些云台的设置步骤。

警告
这些说明适用于 ArduPilot 4.3(及更高版本)。对于 ArduPilot 4.2(及更低版本),请参考 伺服云台 指示。
支持的云台¶
可接受 PWM 输入或 SBUS 输入以控制云台的云台 倾角 应该行得通。
有些万向节可接受 PWM 或 SBUS 输入,但只能提供 费率 控制。这些云台默认情况下不工作,但可以使用云台的配置应用程序对其进行配置,以解释角度控制输入。
支持的云台列表正在制作中。如果您想添加已知可以使用的云台,请 提出问题
连接(飞行)控制器¶
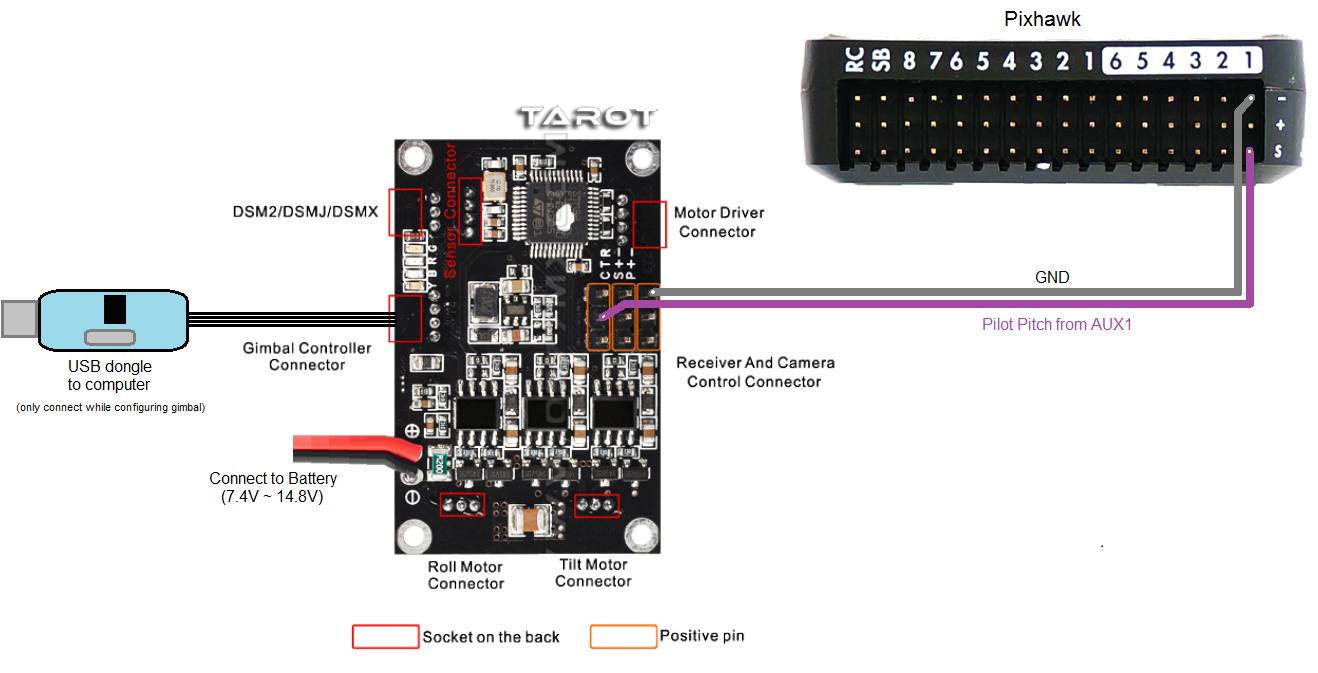
如果万向节有多个 PWM 输入端口(每个轴一个),则将它们连接到(飞行)控制器的 PWM 输出通道。如果万向节接受 SBUS 输入,则将其连接到(飞行)控制器的 SBUSo(又称 "SBus 输出")端口。
用地面站连接(飞行)控制器并设置以下参数。这些设置假定(飞行)控制器的 PWM 输出 9、10 和 11 将分别控制云台的滚转、俯仰和偏航角度。这些设置还假定了万向节的常用角度范围,可能需要根据实际使用的万向节进行调整。
MNT1_TYPE 调至 7(BrushlessPWM)并重新启动(飞行)控制器
MNT1_PITCH_MIN 到 -90(这意味着云台可以直接向下俯仰)
MNT1_PITCH_MAX 至 25(意味着云台可以向上俯仰 25 度)
MNT1_ROLL_MIN 到 -30(意味着万向节可以向右滚动 30 度)
MNT1_ROLL_MAX 到 30(意味着云台可以向左滚动 30 度)
MNT1_YAW_MIN 到 -180(这意味着云台可以向左偏航 180 度)
MNT1_YAW_MAX 到 180(这意味着云台可以向右偏航 180 度)
MNT1_RC_RATE 至 90 (度/秒),以便在使用遥控瞄准时控制万向节的速度
servo9_function 至 8(安装 1 卷)
servo10_function 至 7(安装 1 间距)
servo11_function 至 6(安装 1 偏航/航向)
RC6_OPTION = 213("安装俯仰"),用 RC 通道 6 控制云台的俯仰率
RC7_OPTION = 214("安装偏航")通过 RC 通道 7 控制云台的偏航率
RC8_OPTION = 163("安装锁定"),通过遥控通道 8 在 "锁定 "和 "跟随 "模式之间切换
请参阅本章的 "使用遥控发射机控制 "部分。 本页 了解通过遥控发射器控制云台(又称 "遥控瞄准")所需参数更改的更多详情。
配置云台¶
将云台连接到电脑,并使用其配置应用程序
如果使用 SBUS 输入,则设置输入通道以匹配(飞行)控制器的输出通道
将滚动角度输入设置为输入通道 9
将俯仰角输入设置为输入通道 10
将偏航角输入设置为输入通道 11
如果云台支持 "锁定 "和 "跟随 "偏航控制,则应配置为 "跟随"。
控制和测试¶
参见 云台/支架控制 了解如何使用遥控、GCS 或自动模式任务指令控制云台的详情