使用 StratosnapperV2 触发相机¶
本教程展示了如何连接 Stratosnapper V2 (红外模块)连接到索尼 NEX5,这样就可以通过飞行员的发射器或在飞行过程中触发快门。 摄影任务.
购买地点¶
这种设备越来越罕见,但仍可在以下设备上找到 mjmulticopter.com 和 易趣
部件和硬件连接¶
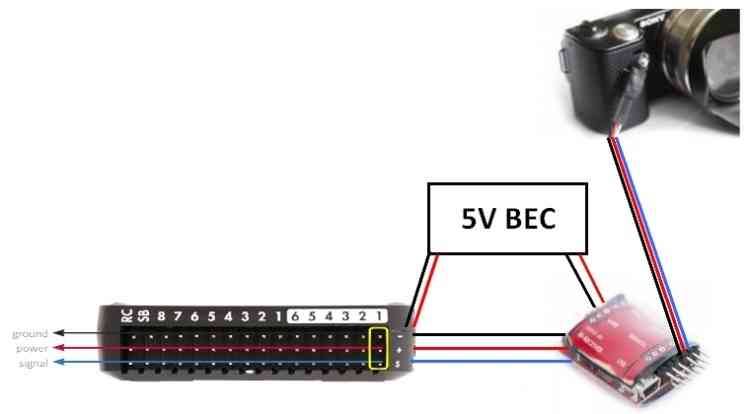
下图显示了所需部件和一般布线。其中包括 Pixhawk、红外触发器设备 (斯特拉托斯纳普)、红外发光二极管和摄像头,以及 BEC(为电容器供电)。 斯特拉托斯纳普.
Pixhawk 板¶
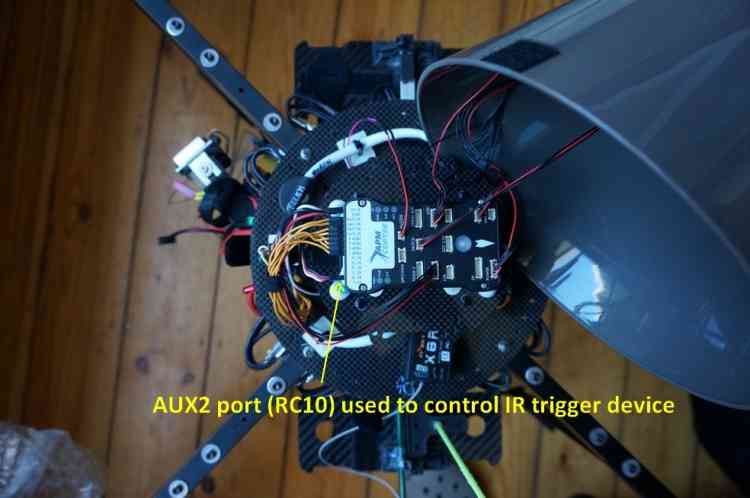
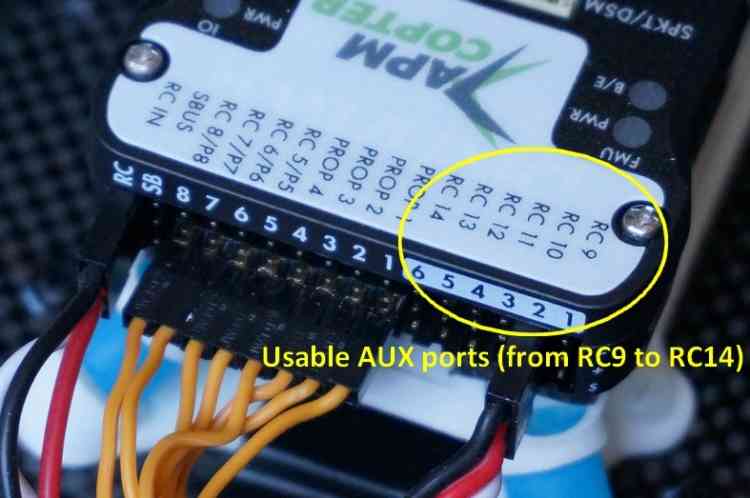
Pixhawk 有 6 个 AUX 端口,可用于触发相机(参见 AUX1-AUX6 = RC9-RC14)。本教程使用端口 2/AUX2,如下图所示:
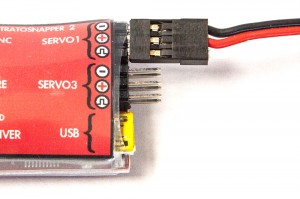
红外触发装置¶
"这款" 斯特拉托斯纳普 及其输入/输出如下所示。伺服输入可以是按钮、摇杆、双向或三向开关等。这些都可以通过 USB 从电脑上使用图形用户界面配置实用程序进行配置。
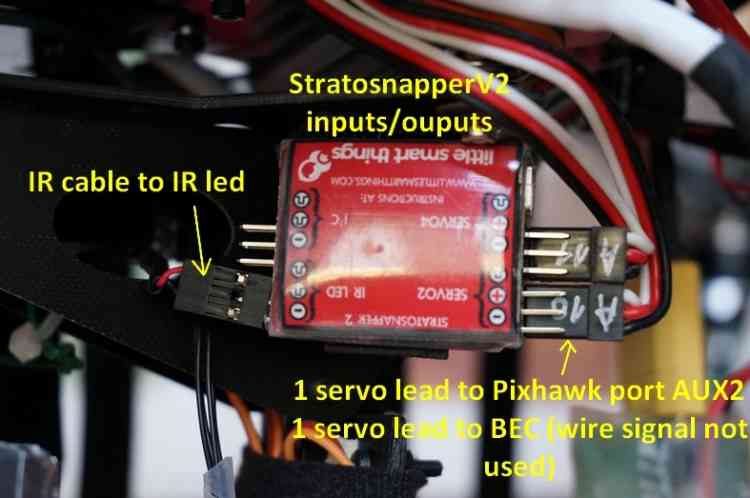
请注意,两根伺服导线是连接在 斯特拉托斯纳普其中一个用于为红外模块供电。
警告
无法通过 Pixhawk AUX 端口为红外模块(或任何其他设备)供电。您必须提供一个单独的 BEC 为红外设备供电,或者使用 BEC 为 Pixhawk 输出轨供电,然后再从输出轨为设备供电。
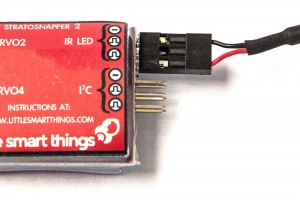
来自 Pixhawk 的控制信号可分配给 4 个伺服输入中的任何一个。
的输出 斯特拉托斯纳普 如下图所示。它与红外电缆相连,红外电缆又会触发一个红外发光二极管,该二极管必须置于摄像头红外传感器前方:
红外 LED 定位和摄像机云台¶
索尼 NEX5 由双轴稳定无刷云台固定(NEX5 未显示)。下面是红外 LED 定位和云台的放大图:
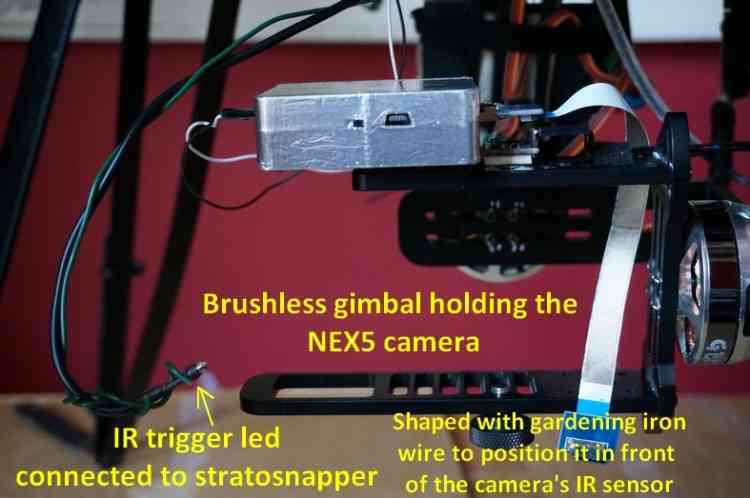
红外 LED 即使在明亮的阳光下也能正常工作(现场验证)。它还能在距离传感器一定距离(在索尼 NEX5 传感器 5 英寸范围内没有问题)以及相对于传感器的任何方向上工作。
Mission Planner地面站中的相机快门配置¶
"这款" Mission Planner地面站中的相机快门配置 文章介绍了如何将 Pixhawk AUX 输出配置为伺服相机触发器。
用于配置 Stratosnapper/IR/NEX5 硬件的参数如下:
CAM_TRIG_TYPE:0(伺服)。快门 (港口):RC10(AUX2)。快门 推动:1800快门 没有 推动:1100快门 持续时间:10(1 秒)伺服 限制 最大:1900伺服 限制 最小:1100CH7_OPT:9(可选 - 仅在摄影机上启用手动快门触发)。
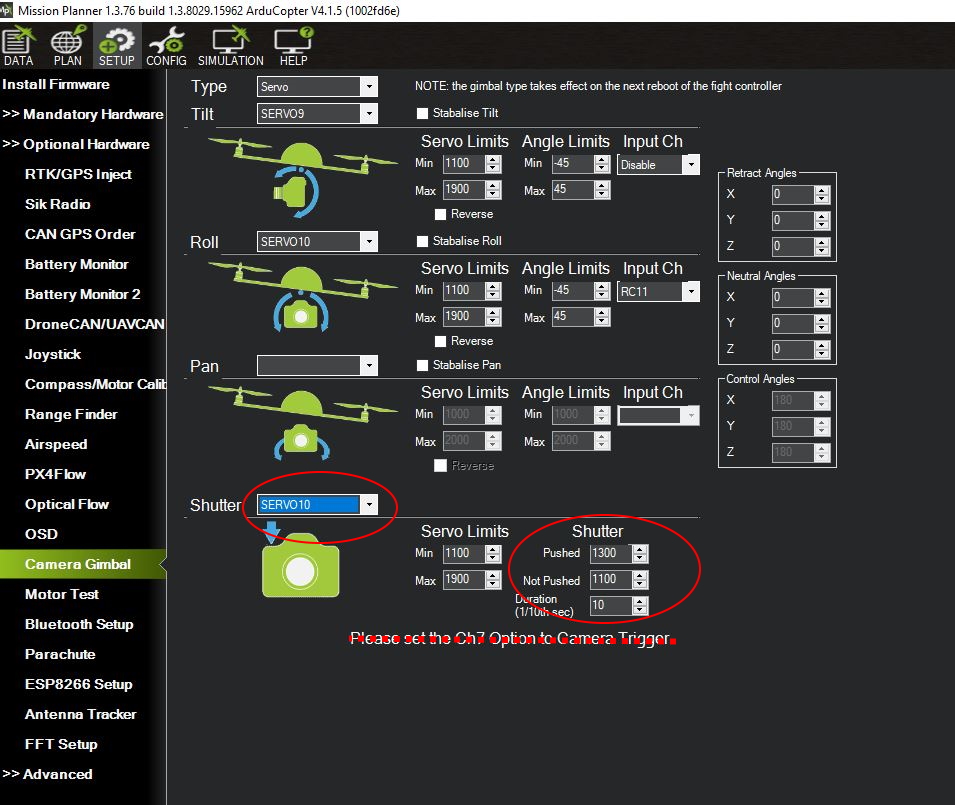
Mission Planner地面站:相机云台设置屏幕¶
红外设备配置(Stratosnapper V2)¶
每个红外设备都有自己的配置方法。 斯特拉托斯纳普 配有一个简单的图形用户界面,用于定义哪些 PWM 值将触发哪些端口。
本视频介绍了红外设备的配置
测试和任务规划¶
一旦定义了摄像机触发器,就可以在 摄像机控制和自动任务 拍摄照片和进行区域调查。
本文中的配置是在创建 调查(网格)示例.