伺服云台¶
ArduPilot 可使用任何一个免费的 PWM 输出通道稳定伺服云台,最多可实现三轴运动。连接后,相机云台可由飞行员使用遥控发射器控制,也可由地面站发送指令或在执行任务时自主控制。
本文介绍如何使用简单的伺服器连接和配置云台,以稳定摄像机的姿态。如果使用 ArduPilot 4.2(或更早版本),本页下方的说明对无刷 PWM 云台也可能有用。
支持的云台¶
任何接受 PWM 输入的伺服万向节都可以使用。具体例子包括
Adafruit 迷你云台套件
安装相机和云台¶
相机需要牢固地安装在云台上,但安装方式要能减少/减弱马达的振动。
将相机安装在云台上的常用方法包括使用软泡沫、硬泡沫、氯丁橡胶管(将相机安装在管子一侧)、手术管、橡皮筋、尼龙螺栓(直接硬连接)和魔术贴。
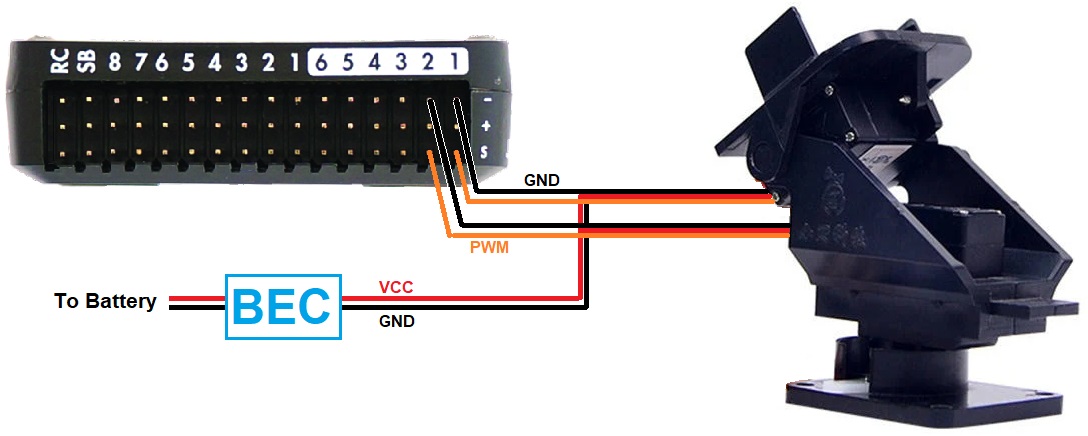
连接(飞行)控制器¶
如下图所示,将万向节的滚动、俯仰和/或偏航舵机信号和接地引脚连接到(飞行)控制器的 PWM 输出引脚。大多数(飞行)控制器不在舵机轨上供电,这意味着需要单独的 BEC。
配置(4.3 或更高版本)¶
备注
Mission Planner 包含一个 "相机云台 "配置屏幕,但尚未更新至与 ArduPilot 4.3(及更高版本)配合使用。
用地面站连接(飞行)控制器并设置以下参数。这些设置假定(飞行)控制器的 PWM 输出 9、10 和 11 将分别控制云台的滚转、俯仰和偏航角度。这些设置还假定了万向节的常用角度范围,可能需要根据实际使用的万向节进行调整。
备注
目前最多可支持两个挂载,即 MNT1 和 MNT2。以下是第一个挂载的参数。第二个挂载具有相同的参数。
MNT1_TYPE 调至 1(伺服)并重新启动(飞行)控制器
MNT1_PITCH_MIN 到 -90(这意味着云台可以直接向下俯仰)
MNT1_PITCH_MAX 至 25(意味着云台可以向上俯仰 25 度)
MNT1_ROLL_MIN 到 -30(意味着万向节可以向右滚动 30 度)
MNT1_ROLL_MAX 到 30(意味着云台可以向左滚动 30 度)
MNT1_YAW_MIN 到 -180(这意味着云台可以向左偏航 180 度)
MNT1_YAW_MAX 到 180(这意味着云台可以向右偏航 180 度)
MNT1_RC_RATE 至 90 (度/秒),以便在使用遥控瞄准时控制万向节的速度
典型的输入和输出分配如下所示,但任何未使用的遥控输入通道或(飞行)控制器输出通道都可分配用于部分或全部这些功能。
servo9_function 至 8(安装 1 卷)
SERVO9_MIN 和 SERVO9_MAX 以匹配滚动伺服的最小和最大范围
servo10_function 至 7(安装 1 间距)
SERVO10_MIN 和 SERVO10_MAX 以匹配螺距伺服的最小和最大范围
servo11_function 至 6(安装 1 偏航/航向)
SERVO11_MIN 和 SERVO11_MAX 以匹配偏航伺服器的最小和最大量程
RC6_OPTION = 213("安装俯仰"),用 RC 通道 6 控制云台的俯仰率
RC7_OPTION = 214("安装偏航")通过 RC 通道 7 控制云台的偏航率
RC8_OPTION = 163("安装锁定"),通过遥控通道 8 在 "锁定 "和 "跟随 "模式之间切换
控制和测试¶
参见 云台/支架控制 了解如何使用遥控、GCS 或自动模式任务指令控制云台的详情
使用Mission Planner地面站(4.2 或更低版本)进行配置¶
在设置/可选硬件菜单下,您可以找到 照相机
云台 设置屏幕。(见下图)
"这款" 类型 框应设置为云台类型。"伺服 "用于非稳定手动控制、ArduPilot 稳定或使用外部云台稳定器。(飞行)控制器需要重启才能生效,并允许更改以下选项。
每个轴 (前平移/俯仰、滚动、偏航/航向选择您在上面连接的相机云台的相应输出通道(虽然在上面显示为 "RCx",但在当前的 MP 版本中,MP 现在会将输出通道选择的标签正确显示为 "SERVOx"),并确保适当的 "稳定" 复选框被选中(但请勿选中 YAW,因为不支持该复选框)。
备注
如果只需要方向控制,而不需要对载具姿态进行修正,那么就不需要对载具姿态进行修正。 "稳定" 复选框。
"这款" 伺服限制 应进行调整,以确保万向伺服器不会卡住。
"这款" 角度限制 应与伺服器限位时万向节本身的旋转角度一致。如果您在测试过程中发现万向节没有正确保持稳定(例如,当您旋转飞行器时,它的校正过大或过小),请稍微向上或向下调整角度限制。
(这些并非真正意义上的 "角度 "限制,而是在 "最小/最大 "参数设置的限制范围内指令伺服器移动的幅度。 伺服限制.
例如如果设置为 -60/+60,当飞行器到达 -60°/+60°时,输出将达到最小/最大(其极限)。如果设置为 -15/+15,当飞行器到达 -15°/+15°时,伺服将达到最小/最大值(其极限值)。
缩回角度 是指云台模式为 "缩回"(即 MNT1_DEFLT_MODE=0)时云台的位置。"缩回 "通常是指将万向节拉入机身,这通常与多旋翼飞行器无关。
中性角度 是指云台首次初始化时的位置。通常是朝向正前方。
控制角 是允许地面站使用操纵杆控制云台的参数。这些值会被地面站覆盖,因此没有必要在 MP 屏幕上进行更新。
如果您发现万向节的移动方向错误,请检查 反向 复选框。
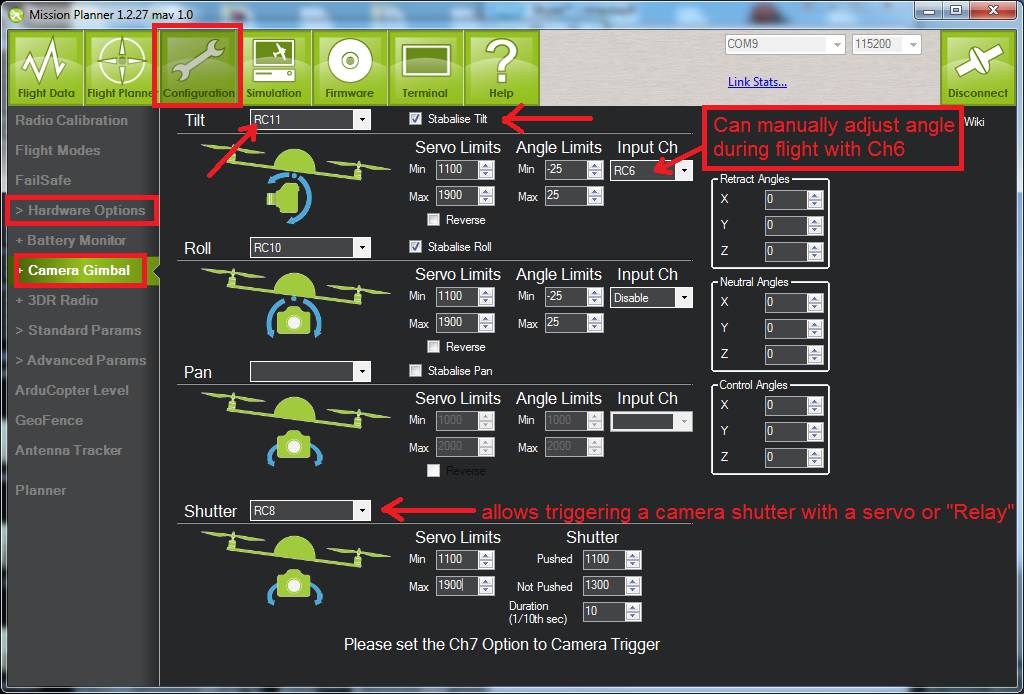
Mission Planner地面站:相机和云台设置屏幕¶
如果您希望在飞行过程中调整万向节的偏航、俯仰或翻滚,可以通过使用 输入通道 选择框。
提示
如果只需要使用伺服器手动偏航和/或俯仰,则可以不使用稳定装置。此外,通过延长 伺服 限制 在某些舵机上,有时可以实现近 180 度的舵机旋转。慢慢增加,边增加边测试,不要过度扩大 PWM 值。当运动停止增加时就停止。
使 PWM 的最小值和最大值与万向节的全抛射高度保持一致¶
本节介绍如何对齐最大和最小 PWM 伺服设置:
将机身向左剧烈翻滚(刚过舵机停止移动的位置,或约 45 度),并提高 "翻滚""舵机""最小 "值,直到舵机开始微微移动,然后停止。
将机身向右猛烈翻滚(刚刚越过伺服器停止移动的位置,或约 45 度),并降低 "翻滚""伺服器""最大 "值,直到伺服器开始物理移动一点点,然后停止。
间距重复(向前和向后运动)
调平/对中万向节¶
调平万向节并使其居中:
保持机身完全平直
如果万向节不是完全水平,请先调整硬件,例如,在进行下一步操作之前,先调整伺服器喇叭,使万向节尽可能接近水平。方法是拧下舵机角并重新定位,和/或如果在万向节上使用推杆,则调整推杆的长度。
如果 "音高 "仍不太平,可以通过调整
MNT_PITCH_MIN和MNT_PITCH_MAX......向同一方向各点击一次(例如,向下箭头和向下箭头各点击一次),这将确保它们之间的差值保持不变(这很重要),但会对万向节的 "中心 "位置进行少量调整(不要调整太多,因为这会对两端的最大投掷量产生相同的影响)。
快门配置¶
参见 Mission Planner地面站中的相机快门配置 了解如何将快门触发与 ArduPilot 集成。
参见 相机和云台 页面上各种触发方法的链接。
参见 云台/支架控制 以获取安装控制和瞄准信息。
其他参数¶
当飞行器围绕目标移动时,万向节中的伺服器对飞行器滚动和俯仰的位置/角度变化的反应可能较慢,因此摄像机拍摄的画面可能会有一些明显的滞后。使用这些参数可使万向节的输出比飞行器的运动更快一些,从而减少滞后现象。
Revs 4.3 或更高版本¶
转速 4.2 或更低¶
MNT_LEAD_RLLMNT_LEAD_PTCH