Pixhawk 相机触发器设置¶

本指南旨在帮助您改装用于 ArduPilot (飞行)控制器的遥控快门线,并设置飞行控制器以触发相机。这种方法无需(也不需要)安装 3 个遥控快门线。rd 方触发设备。在本示例中,我们将使用索尼 Alpha 6000 (A6000) 相机。本程序也可用于其他相机,但在本示例中,我们将使用索尼阿尔法 A6000(A6000)相机。
所需物品¶
索尼 A6000(或其他带线控快门释放器的相机)
与 ArduPilot 兼容的(飞行)控制器,带有一个可用作继电器引脚的空闲 GPIO 引脚。请参见 GPIO 更多信息
遥控快门线 (在此了解经济实惠的解决方案)
伺服引脚 (链接)
伺服引脚压接器 (链接)
剥线钳或剃须刀片
安装了Mission Planner地面站的笔记本电脑
步骤 1: 准备遥控快门线
将遥控快门线微调到所需的线长

剥去约 2-3 厘米的黑色套管,确保不要损坏套管内的 3 根导线。
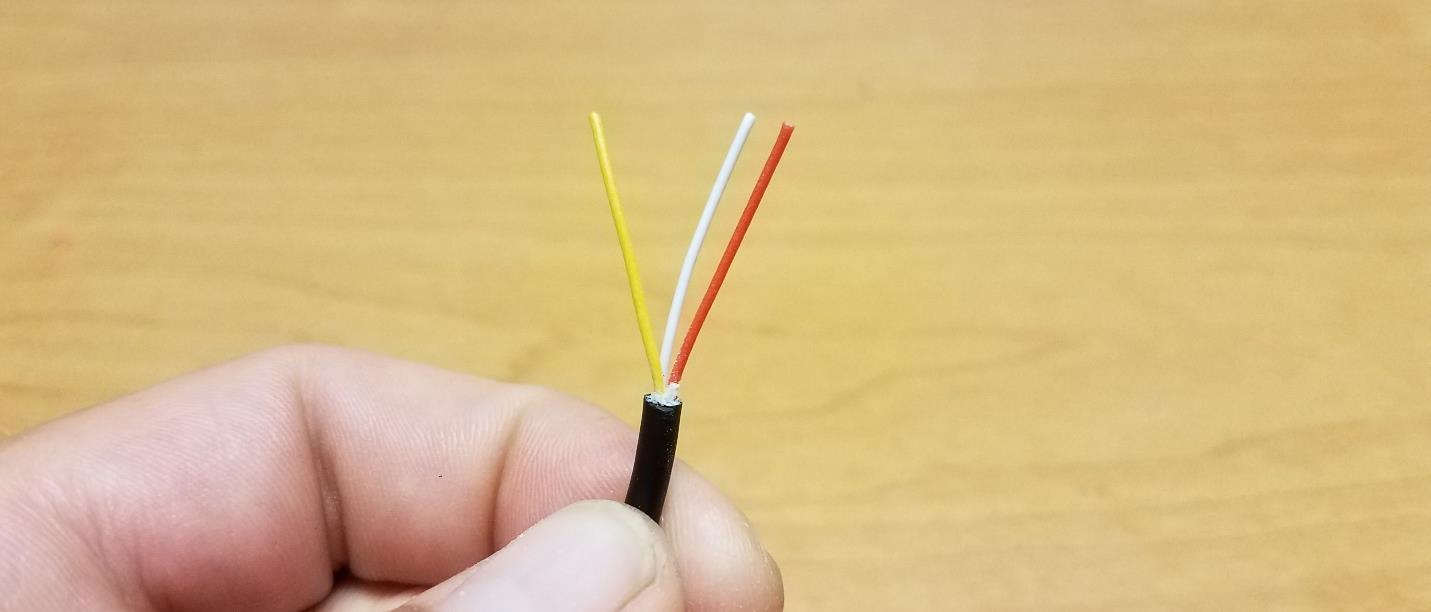
从三根导线上分别去掉大约 3 毫米的套管。您需要确保去除的套管足够多,这样当伺服针与导线压接时,针与裸露的导线之间才会有接触。
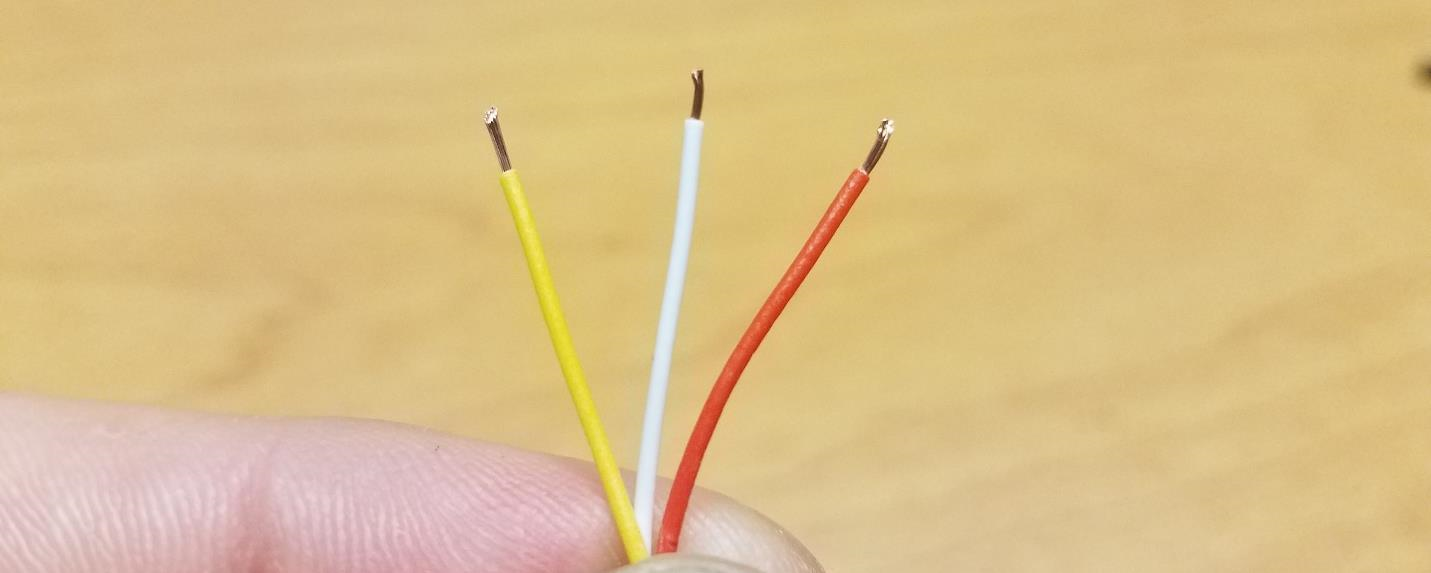
这三根导线具有以下功能:
红色关闭
黄色:地面
白色:聚焦
注意: 您的线缆颜色可能与此示例不同。您可以将电缆连接到摄像机,接通电源,然后将电缆成对短路,以确定哪一对电缆控制哪些功能。例如,如果您有一组绿色、蓝色和黑色电线,短接蓝色和黑色电线会导致相机对焦,然后短接绿色和蓝色电线不会发生任何事情,但短接绿色和黑色电线会导致相机曝光,那么您就知道黑色电线是接地线,绿色电线是快门线,蓝色电线是对焦线。
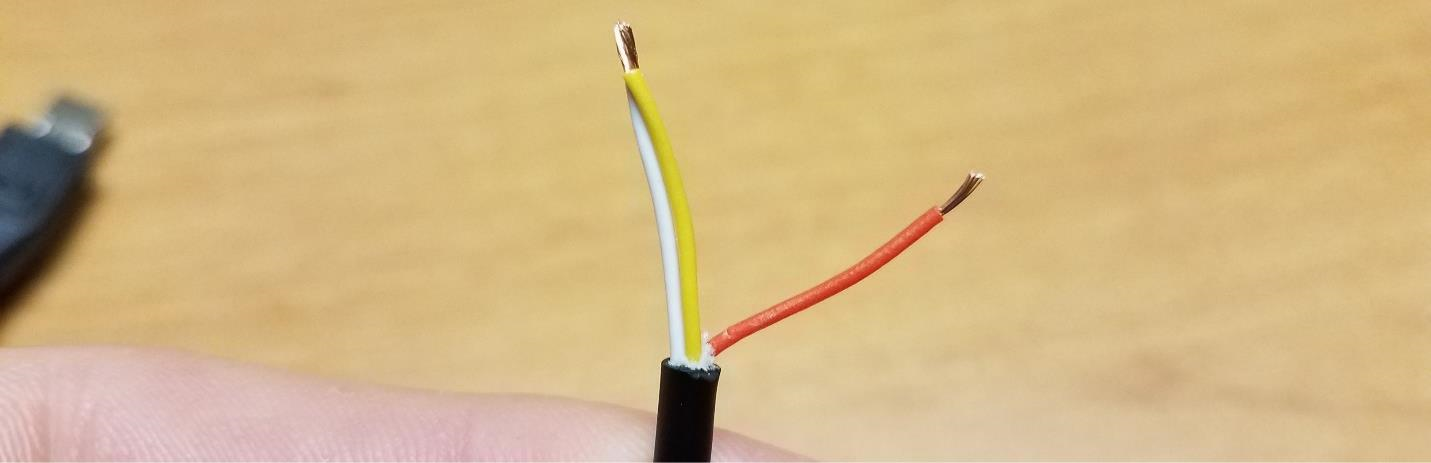
将 FOCUS 和接地导线的外露端拧在一起,然后将伺服连接器压接在这对导线上以及 SHUTTER 导线的外露端上。
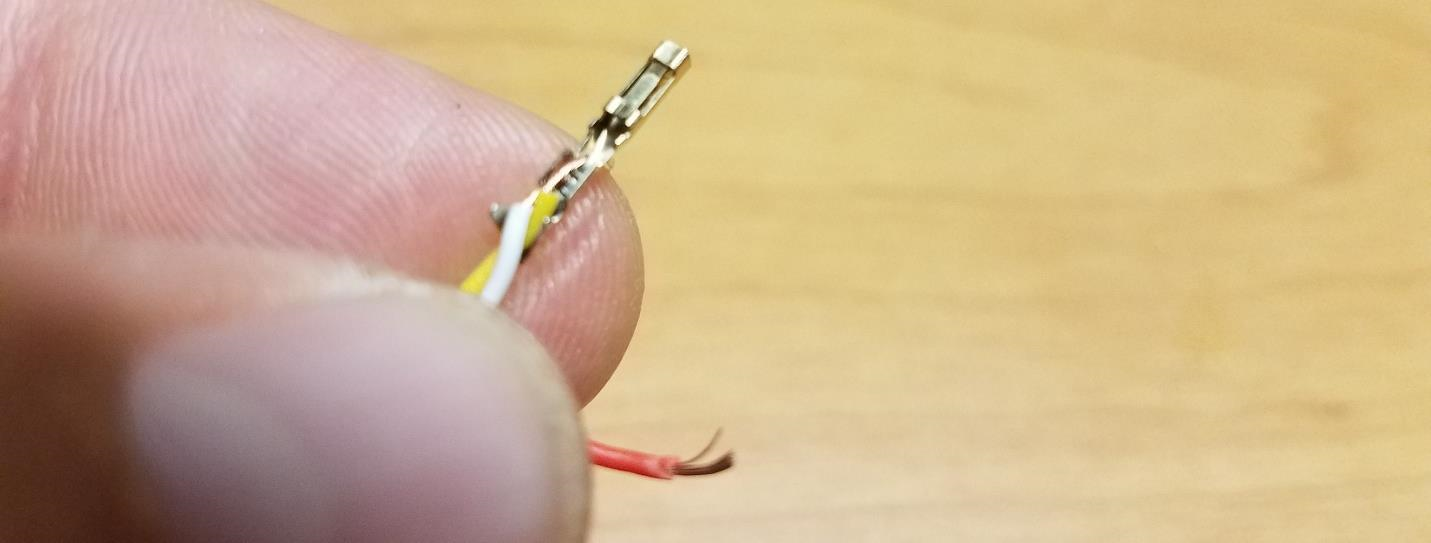
提示: 伺服针上有两组凸片,压接后会相互折叠并固定导线。为了让操作更简单一些,请使用一把小尖嘴钳将伺服针末端的一对卡舌紧紧压在导线上。这样可以防止压接时电线从舵机销中脱出。
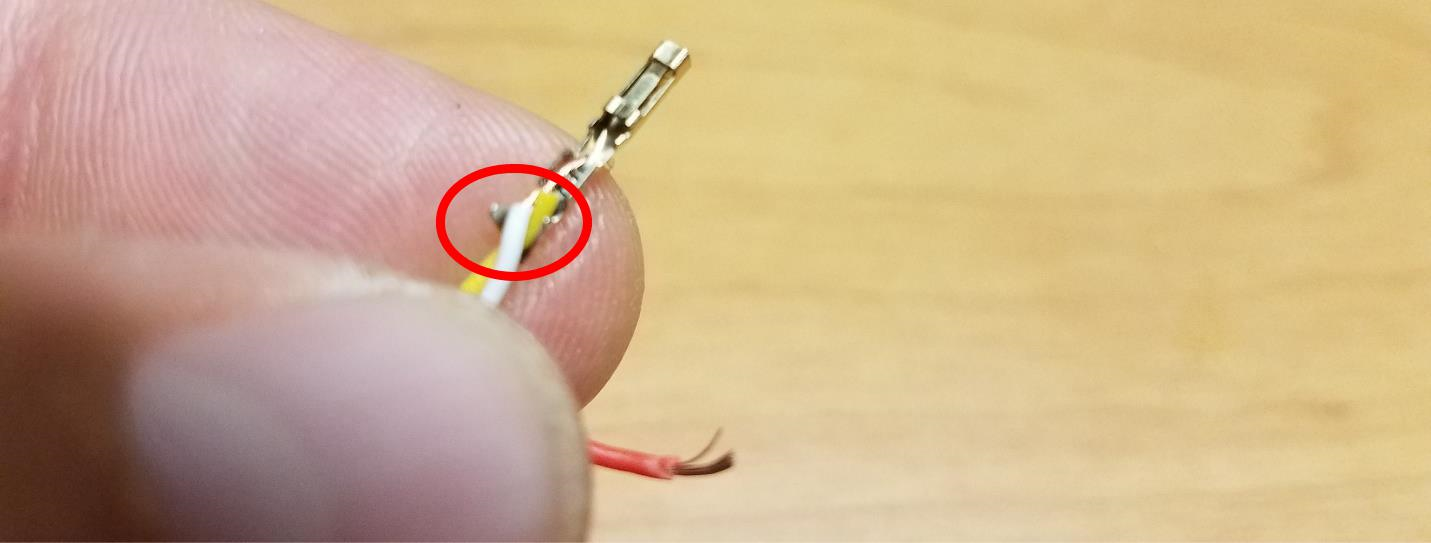
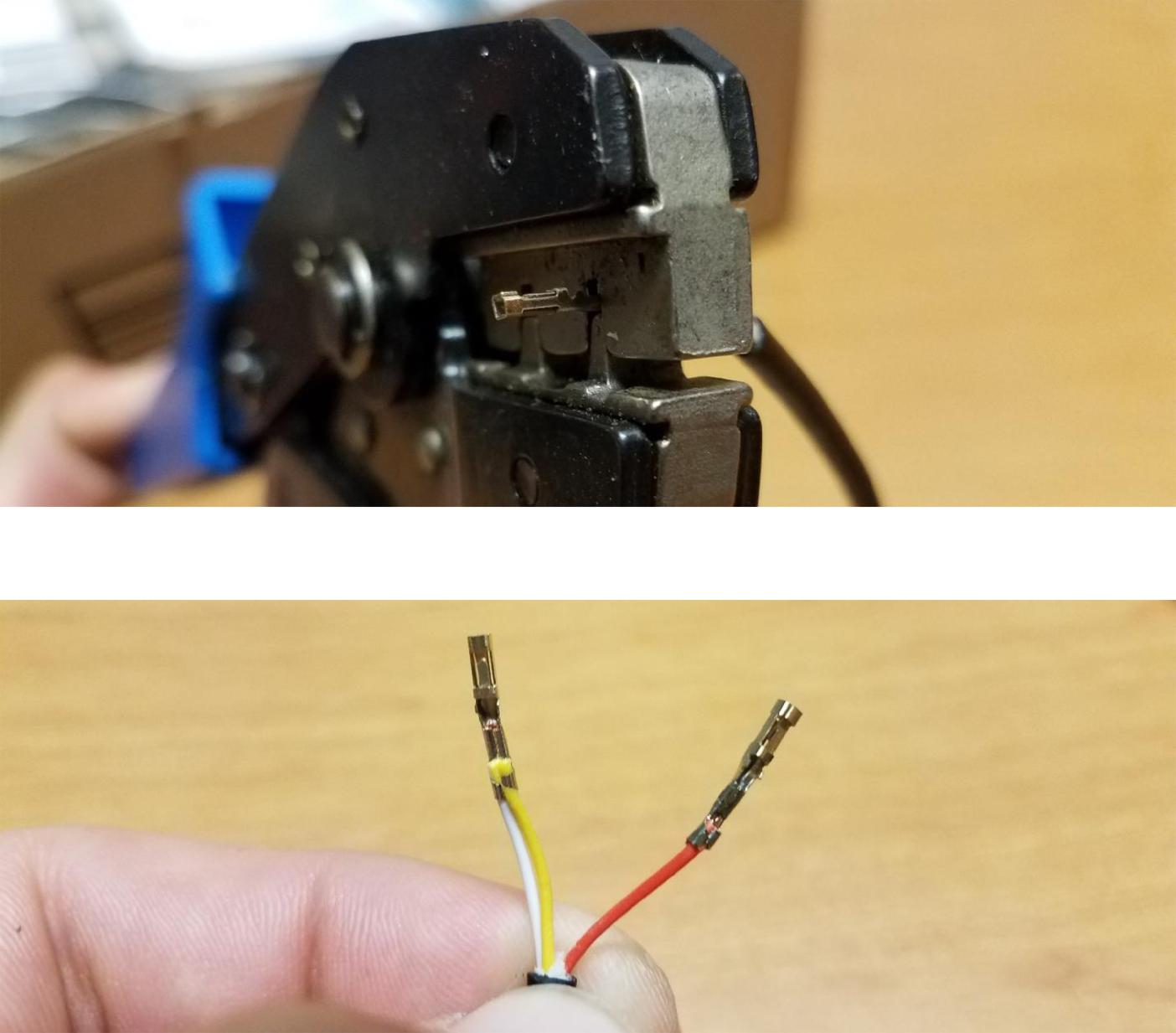
将伺服插针插入伺服连接器,伺服连接器中间插槽的两侧各有一个插针。
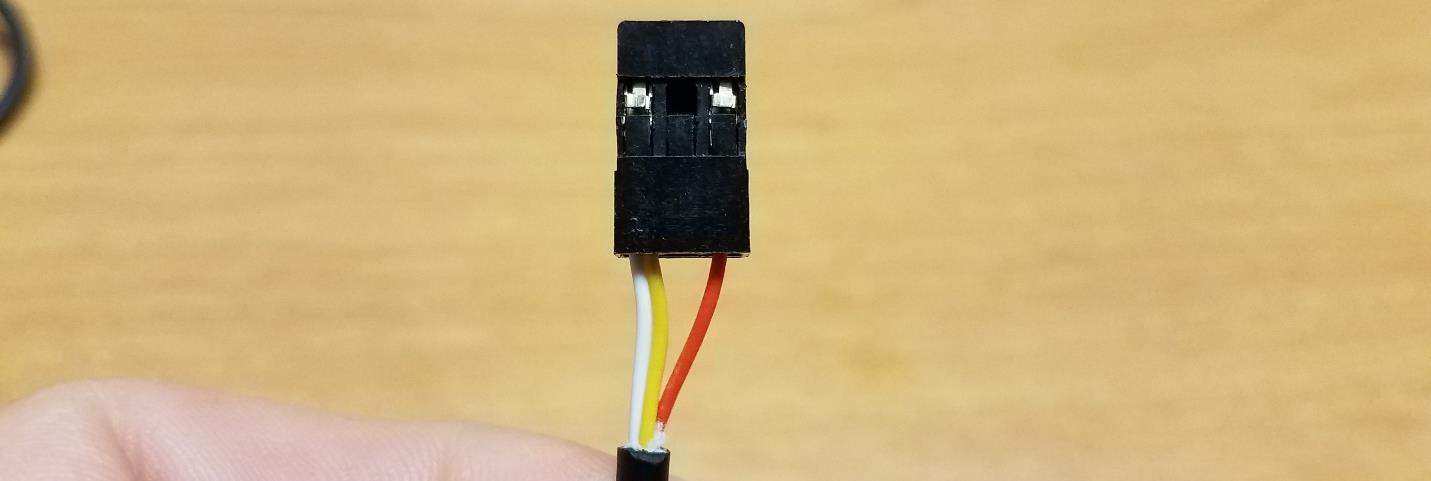
电缆现在可以连接到 Pixhawk 控制器。请注意,快门引脚(本例中为红线)将位于辅助端口的信号侧,而白线/黄线将位于辅助端口的接地侧。
步骤 2: 设置(飞行)控制器,通过快门线触发相机
通过Mission Planner地面站以 USB 直接连接或无线遥测连接的方式与(飞行)控制器连接。
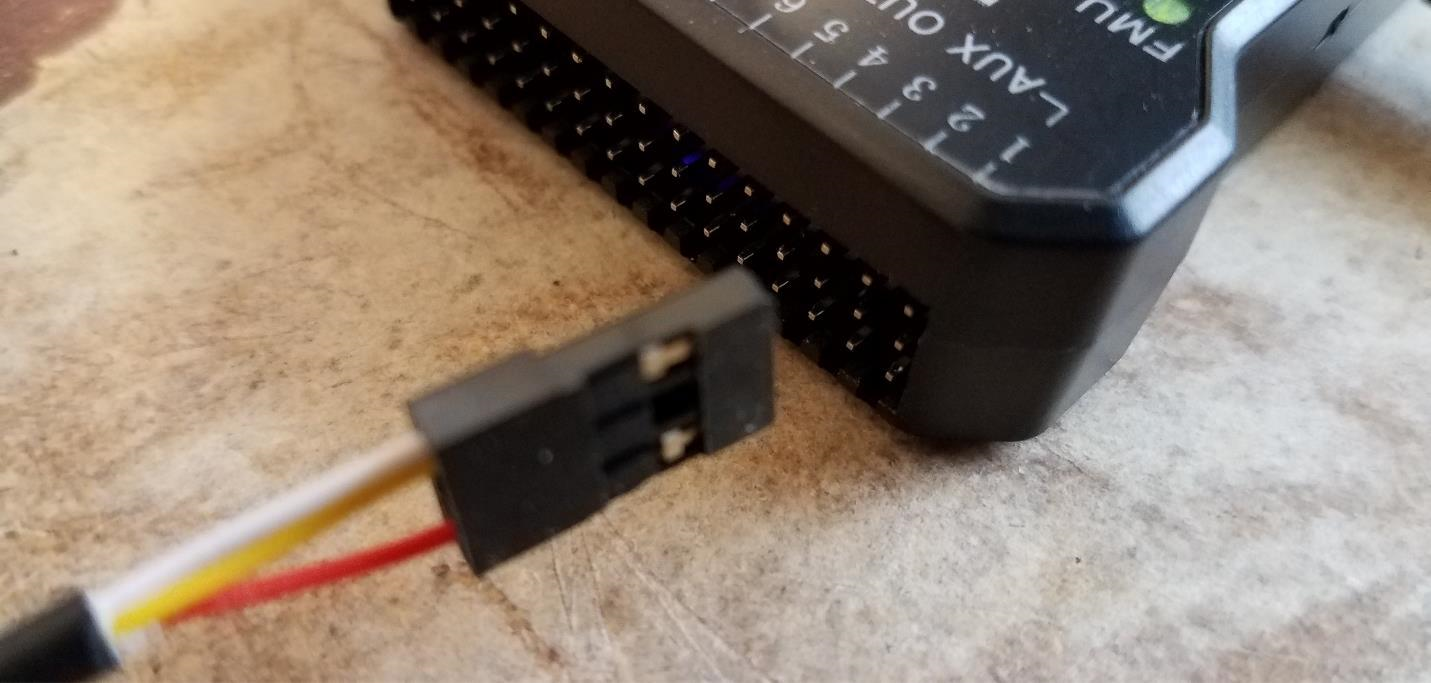
将修改后的快门线连接到(飞行)控制器上的一个空闲的 GPIO 引脚上,确保极性方向正确。例如,Pixhawk 默认将 AUX5 或 AUX6 配置为 GPIO,可用作继电器输出。
将快门线连接至相机并打开相机电源

由于我们已将 FOCUS 和 GROUND 线短路,因此摄像机应自动对焦。到目前为止,我还没有找到将快门线、焦点线和接地线分别连接到(飞行)控制器并让(飞行)控制器依次拉动摄像机对焦和触发摄像机的方法。为了解决这个问题,我们对摄像机进行了设置,使摄像机激活了以下功能:
快门前对焦
连续自动对焦
在Mission Planner地面站中,导航至初始设置 ->摄影机 GIMBAL,并将快门下拉菜单更改为 "RELAY"。
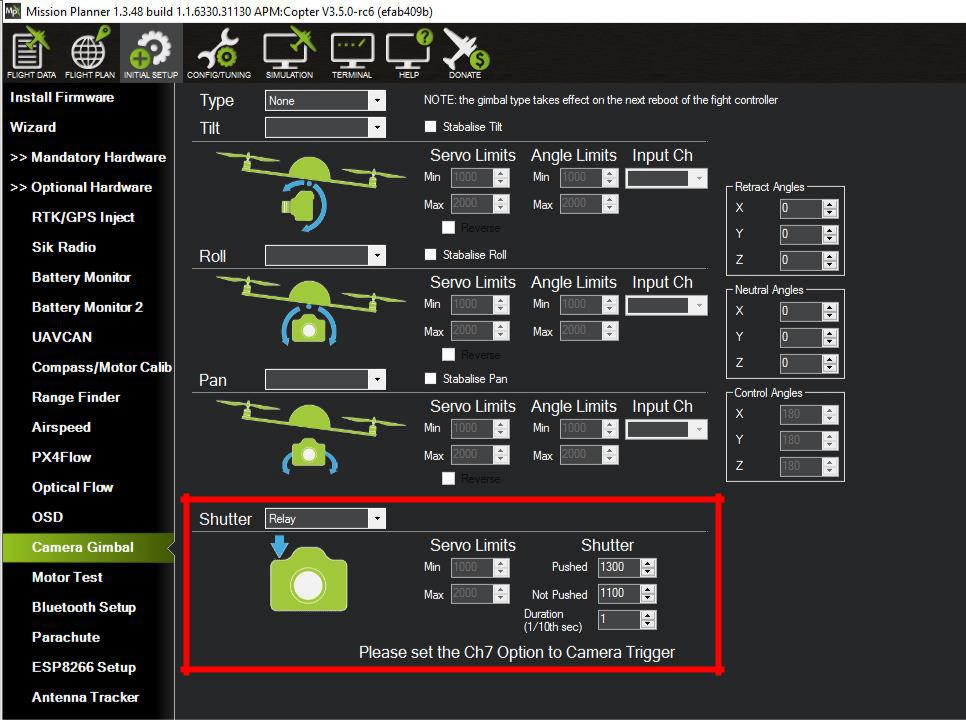
注意:您可以使用 "持续时间 "值来增加或减少快门指令的响应速度。使用索尼 A6000 时,持续时间为 1/10第 第二秒的功能非常完美。
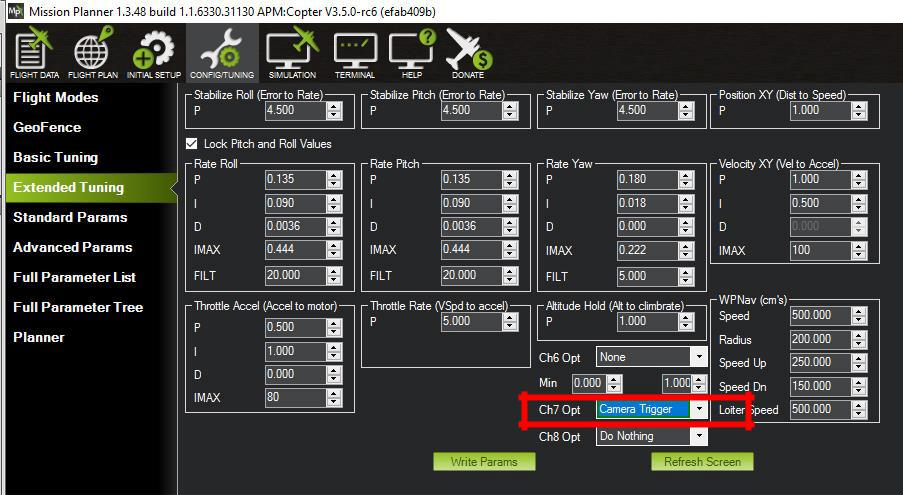
进入 Mission Planner 中的 CONFIG/TUNING -> EXTENDED TUNING(配置/飞行稳定调整-> 扩展飞行稳定调整)屏幕,将 CH7 OPT(选项)更改为 "相机触发"。如果除了让(飞行)控制器触发照相机外,还打算使用遥控器 CH7 触发照相机,则必须执行此操作。
备注
从 4.0 固件版本开始,任何 GPIO 都可以通过其 SERVOx_FUNCTION 参数,任何 RC 通道都可以通过其 RCx_OPTION 参数。
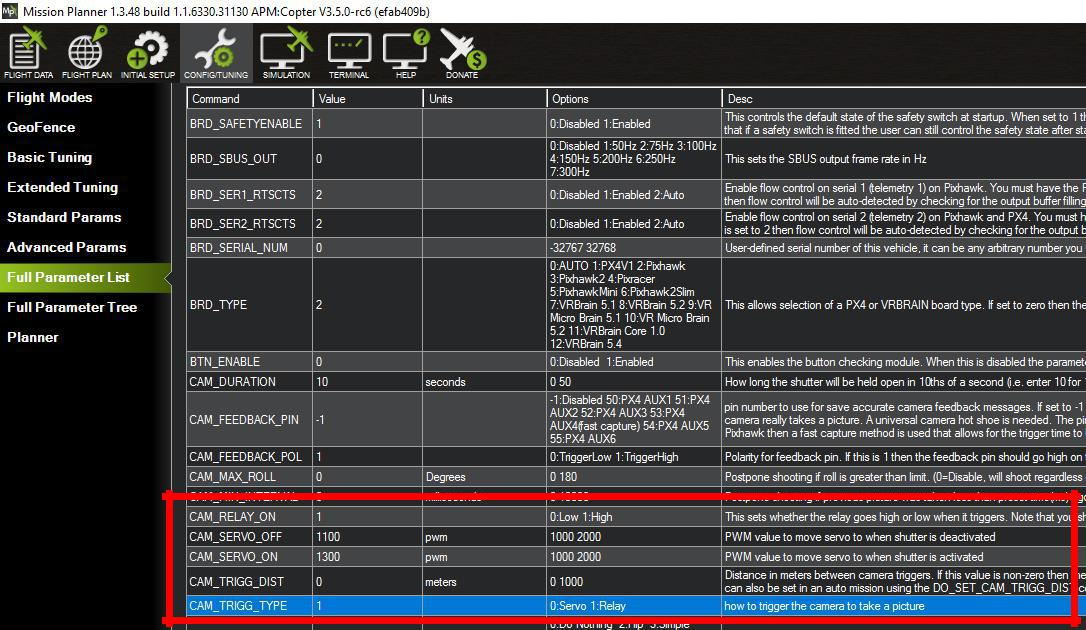
导航至主 "配置/飞行稳定调整 "选项卡下的 "完整参数列表",找到
CAMx_TRIGG_TYPE参数。对于 "RELAY(继电器)",该参数必须显示为 1。如果未设为 1,则在进行下一步之前将该参数设置为 1。
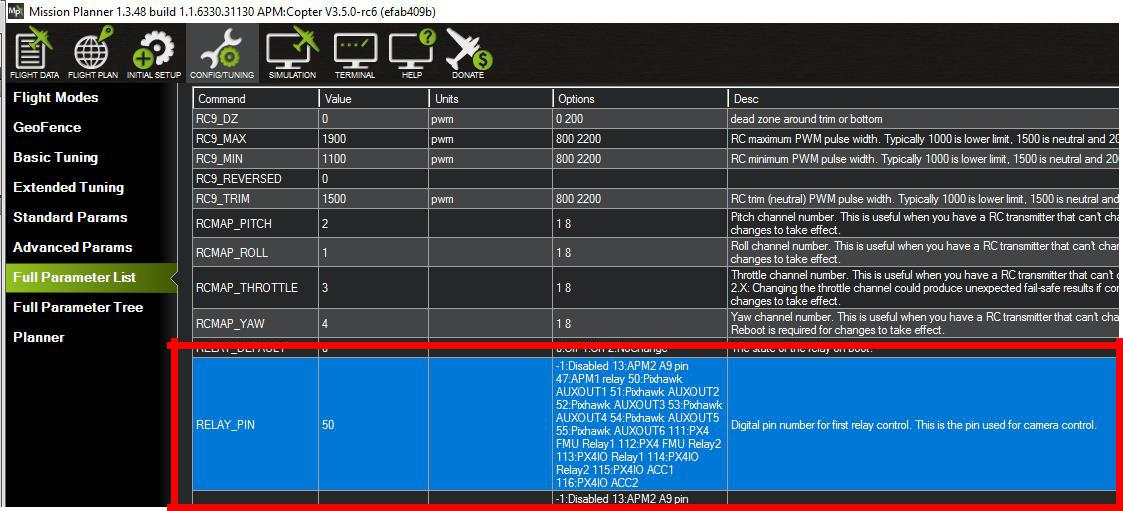
向下滚动参数,直到找到
RELAYx_PIN(第一个继电器针脚......最多可以有 6 个)。在此您需要设置继电器引脚参数,以匹配您连接快门线的 GPIO 引脚。由于我们将电缆连接到了 Pixhawk 的 AUX6,因此需要更改RELAYx_PIN参数为 "55"(55:Pixhawk AUXOUT6)。
更改所需参数后,点击 "WRITE PARAMS(写参数)"。
步骤 3: 测试遥控快门线和(飞行)控制器
现在,电缆已改装完毕,并连接到(飞行)控制器上,(飞行)控制器已设置为通过继电器触发摄像头,让我们来测试一下。
返回 "飞行数据 "屏幕,右击地图选择 "立即触发摄像机"。

点击后,您应该会听到或看到摄像机曝光。如果相机没有曝光,请检查以下内容:
电缆的正确方向(即快门线连接到(飞行)控制器正确端口上的信号针脚,接地线连接到接地端)
摄像机已打开且未处于出错状态
相机镜头不要太靠近可能导致无法自动对焦和曝光的物体
如果您仍然无法让相机曝光,并且上述所有检查点都没有问题,那么您可能需要调整步骤 2 D 部分中提到的快门持续时间。
如果您的相机拍摄了照片,那么恭喜您!无需第三方硬件,您就可以使用(飞行)控制器拍照了!
非常感谢 Oliver Volkmann 和 *www.microaerialprojects.com* 感谢您提供本页。