相机快门配置¶
ArduPilot 允许您将特定端口(伺服或继电器)配置为摄像机触发器,然后在以下情况下激活该端口 在任务中指定摄像机命令.
本文介绍了舵机和继电器需要配置的设置。有关基于继电器的典型触发器,请参阅这篇以 Pixhawk (飞行)控制器为例的 DIY 文章: Pixhawk 相机触发器设置.
备注
伺服或中继端口信号必须转换成特定摄像机可以理解的格式(红外线、电缆或其他)。配置设置取决于执行转换的硬件。本节链接了一些有用的硬件配置和设置。 为不同相机设置数值.
配备 Pixhawk 或 IOMCU 的(飞行)控制器的快门配置¶
备注
在不使用 IOMCU 的(飞行)控制器上(大多数使用 IOMCU 的(飞行)控制器将输出标记为 MAIN/AUX),任何输出都可用于继电器或伺服器。参见 GPIO 了解如何将输出指定为 GPIO 供继电器使用。
Pixhawk 有 6 个 AUX 端口(AUX1-AUX6,在 Pixhawk 中称为 SERVO9-SERVO14)。 Mission Planner地面站) ,可配置为 伺服器, 继电器或 数字输入或输出.下面的图片和配置适用于 Pixhawk,其 SERVO10(该(飞行)控制器上标有 RC10/AUX2)连接到相机控制硬件,并配置为伺服或继电器。
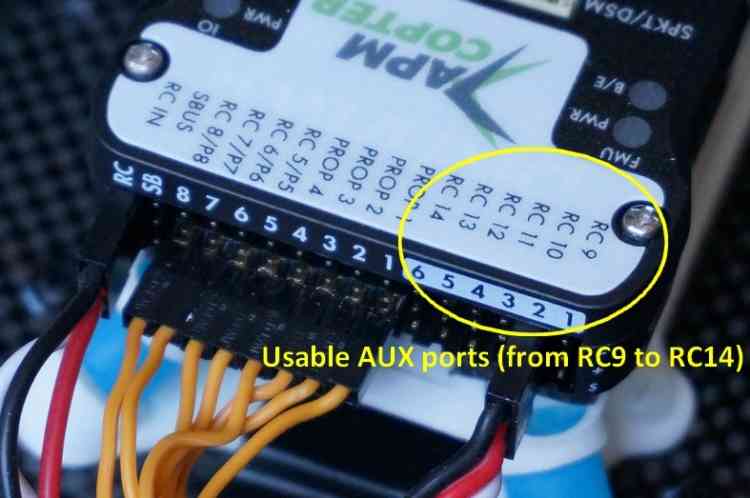
Pixhawk 详细视图突出显示 AUXPorts¶
提示
您可以监控和记录 正是 当摄像机被触发时。更多信息请参阅 增强的摄像机触发记录功能 见下文。
快门使用的实际输出在设置/可选硬件/相机云台屏幕中进行设置和配置:
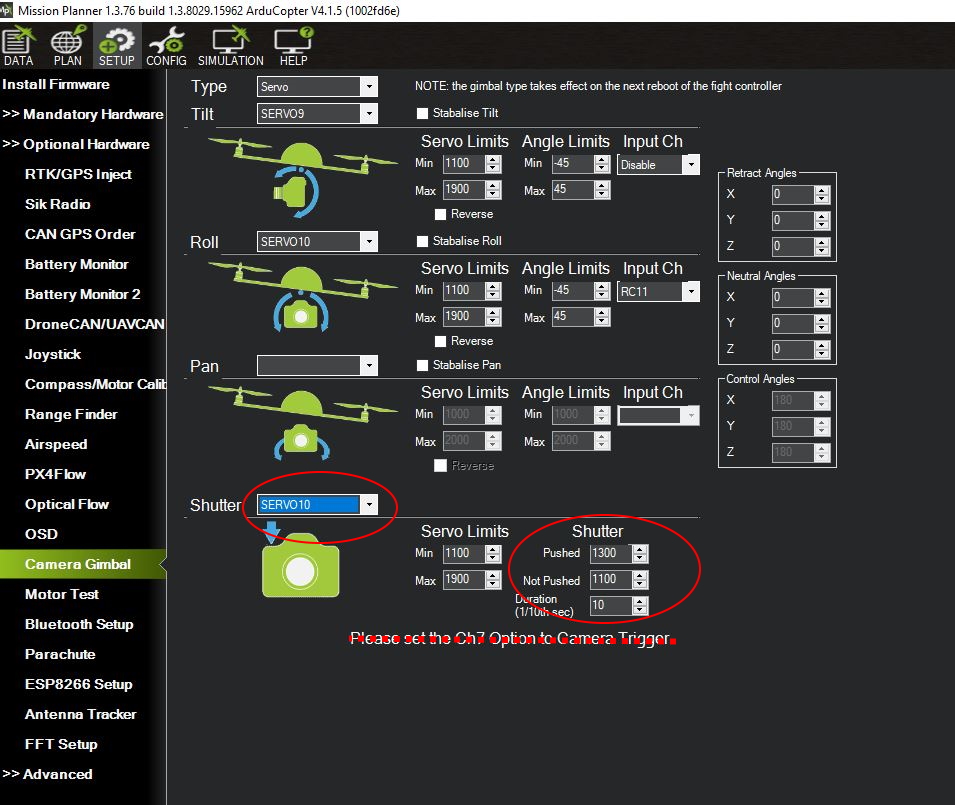
Mission Planner地面站:相机云台配置屏幕¶
"这款" 快门 下拉列表用于设置摄像机触发器的连接输出。这里我们选择了 SERVO10,它与 Pixhawk 上的 AUX2 相对应。
"这款" 持续时间 设置可指定伺服器/继电器在 "ON "模式下的保持时间。 推动 快门启动时的状态,以十分之一秒为单位。上面的值是 10,因此按下状态保持一秒。 未推动 当快门未激活时。
仅适用于伺服(继电器输出的设置忽略不计):
快门 推动 和 未推动 设置是伺服处于这些状态时将发送的 PWM 信号值。
"这款" 伺服限制 设置指定了 PWM 信号值的范围,在此范围内伺服将不会绑定。
备注
任务计划者 "屏幕上的 "请将 Ch7 选项设置为摄像机触发器 "的要求已过时,而 "晶体管 "选项中的 "晶体管 "也已过时。 快门 下拉列表没有任何作用。
要设置哪个 RC 通道将控制手动快门释放,请配置其
RCx_OPTION中的 "摄像机触发器"。
增强的摄像机触发记录功能¶
ArduPilot 会在以下情况下记录 TRIG 信息 触发器 摄像机。此外,您还可以设置 ArduPilot 在摄像机实际启动时记录 CAM 信息,方法是连接一个 数字输入引脚 将(飞行)控制器上的热靴连接到相机的热靴上(考虑使用 Seagulls SYNC2 鞋拔转接器).这样可以更准确地记录下记录图片的确切时间。
您需要将其中一个 AUX 引脚配置为数字 GPIO 输出/输入,并将其连接到相机闪光灯热靴(需要通用相机热靴)。该引脚应保持至少 2 毫秒,以便进行可靠的触发检测。
主要步骤如下(以 Camera1 实例为例):
开放 Mission Planner地面站 然后点击 配置/飞行稳定调整/完整参数列表
将至少两个输出引脚设置为数字 GPIO 输出/输入,如图 4 所示。 GPIO.
设置 cam1_feedbak_pin 连接到热靴的针脚编号。
设置 cam1_feedbak_pol 以指示拍摄照片时反馈引脚(热靴电压)变为高电平还是低电平。
为不同相机设置数值¶
伺服/中继设置所需的实际值取决于用于向摄像机发送快门信号的硬件。以下主题介绍了一些特定摄像机/相机类型的硬件设置和配置设置:
使用 Stratosnapper 触发相机 - 显示了如何连接带有红外接口的摄像机。Stratosnapper 也可用于连接使用其他电缆和协议的摄像机
带继电器和 CHDK 的 APM 相机快门 - 演示了如何设置中继端口以向运行 CHDK 的佳能摄像机发送信号(在 APM2.x 上)。
如果这些不适合您的硬件配置,我们建议您查看硬件手册,了解可接受的伺服/继电器输入信息。
备注
"这款" CHDK 摄像机控制教程 并不是集成相机快门的好例子,因为它没有使用本文介绍的标准快门配置。但这是一个很好的例子,说明如何使用 CHDK 访问佳能相机的其他功能(例如变焦)。