ArduRoller 平衡机器人¶
ArduRoller 是一个 BalanceBot 框架,最初由 Jason Short 设计(描述于 这篇 Makezine 文章).如下所述,Rover-3.5(及更高版本)支持该框架。
这个车架的一个问题是,电机有一些间隙,导致静止时会有轻微晃动。使用 步进电机
部件清单¶
4" 透明塑料球 可选
mRobotics Pixhawk (飞行)控制器. 其他(飞行)控制器 也可以使用,但它们必须有 GPIO 输入引脚,以支持 轮编码器.
小型 3S 电池,如 特耐吉 1600mAh 3S 20C
任何 8 通道(或更多)发射器,如 Futaba T10J
连接和设置¶
设置 Roboclaw 电机驱动器:
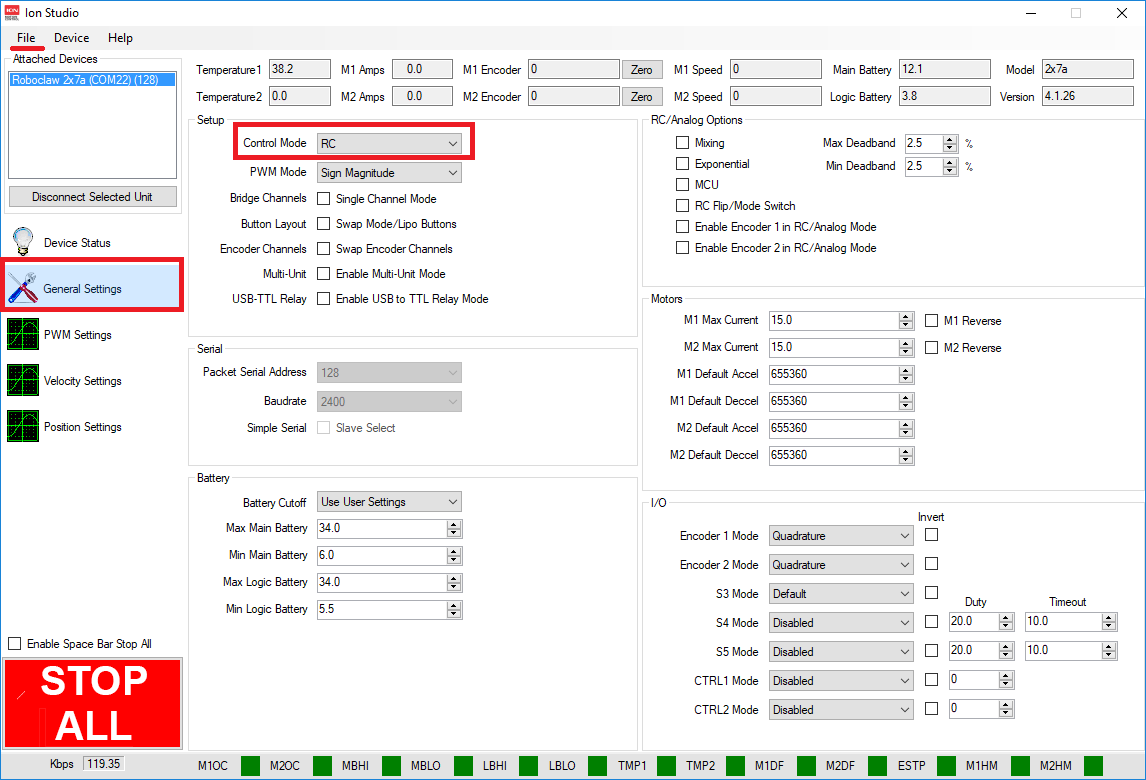
下载并安装 ION Studio 配置软件
用 USB 电缆将 Roboclaw 电机驱动程序连接到电脑上
连接 ION Studio,然后在 "常规设置 "页面设置控制模式 = RC
从文件菜单选择 "保存设置"。
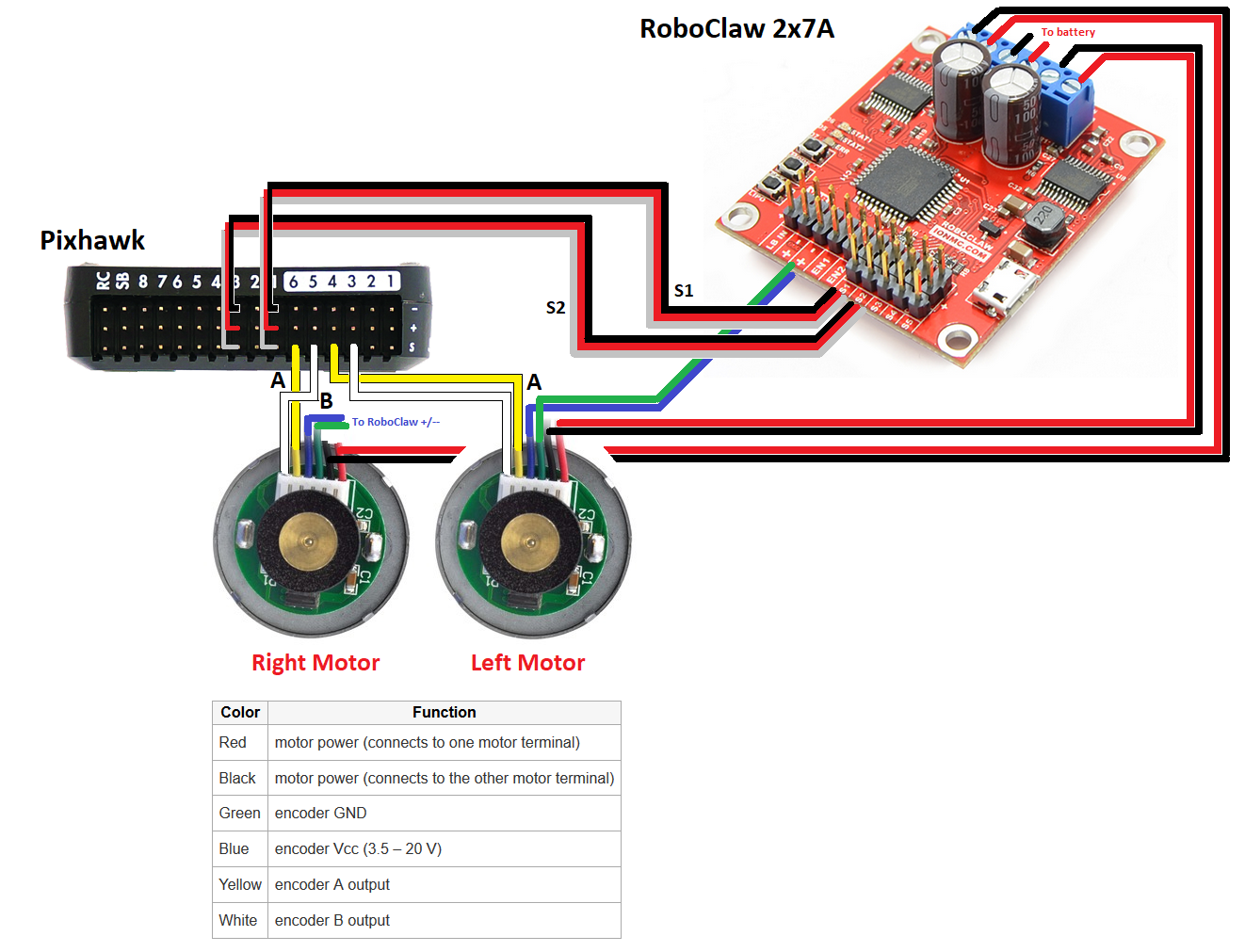
将车轮编码器上的黄线和白线连接到 AUX OUT 3、4、5、6 引脚上,如图所示。 轮编码器维基页面
如下图所示连接(飞行)控制器、电机驱动器和电机
使用的固件Rover-3.5
参数文件: ArduRoller 平衡机器人
也可以使用Mission Planner地面站的 "配置/调整 >>全参数树 "页面加载该参数文件,方法是从右侧中间的下拉菜单中选择 "ArduRoller-balancebot",然后按下 "加载预存 "按钮。