雷虎丰田喜路¶
Thunder Tiger Toyota Hilux 是一款相对便宜的四轮驱动遥控车,最高速度约为 1 米/秒。
这种车架的一个弱点是,一旦车架上装载了所需的电子设备((飞行)控制器、全球定位系统、接收器),悬挂系统就会变得有点软,从而导致在停车时车身有些晃动。
部件清单¶
雷虎丰田 Hilux 车架 可从许多零售商处购买,包括 亚马逊
Hex Cube (飞行)控制器 或类似
Adafruit ESP8266 无线遥测板
任何 8 通道(或更多)发射器,如 Futaba T10J (ArduPilot目前不支持随框架提供的双通道发射器/接收器)
安装电子设备¶

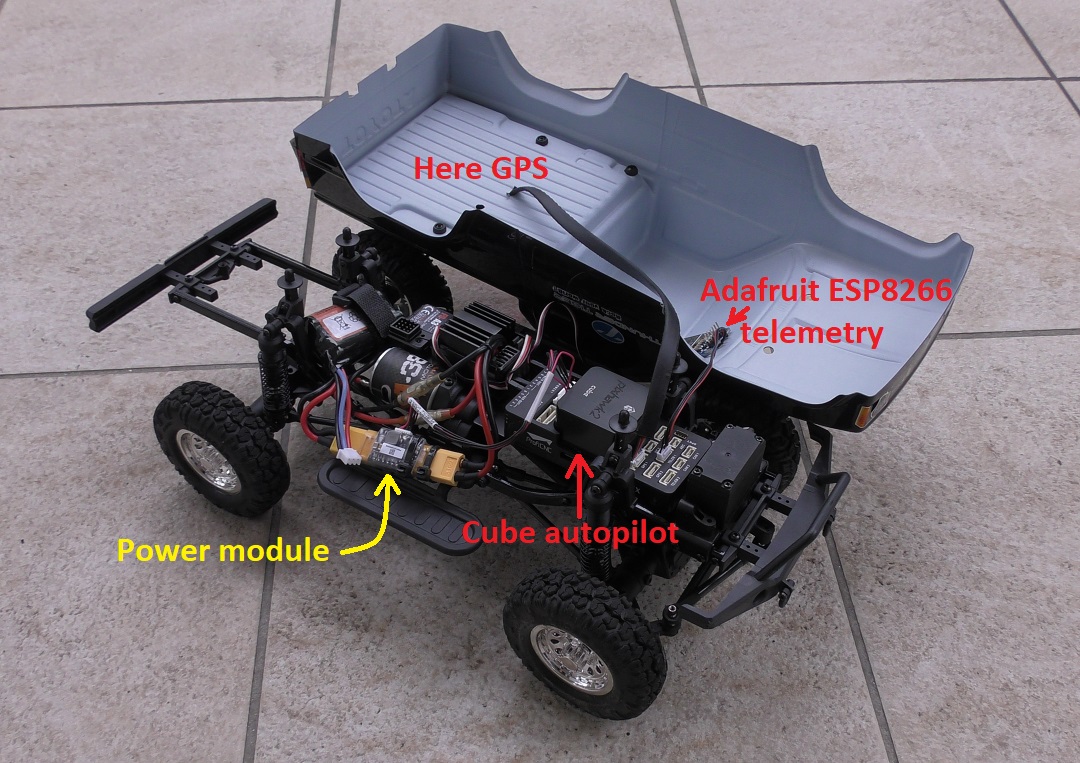
Cube (飞行)控制器可轻松安装在车架前部
GPS 应放置在远离发动机和电池的地方。在本示例中,GPS 被放置在后货箱中
需要进行一些焊接,以便将 2S 电池插入电源模块
的 Adafruit ESP8266 wifi 遥测板应连接至 Cube 的 Telem1 端口
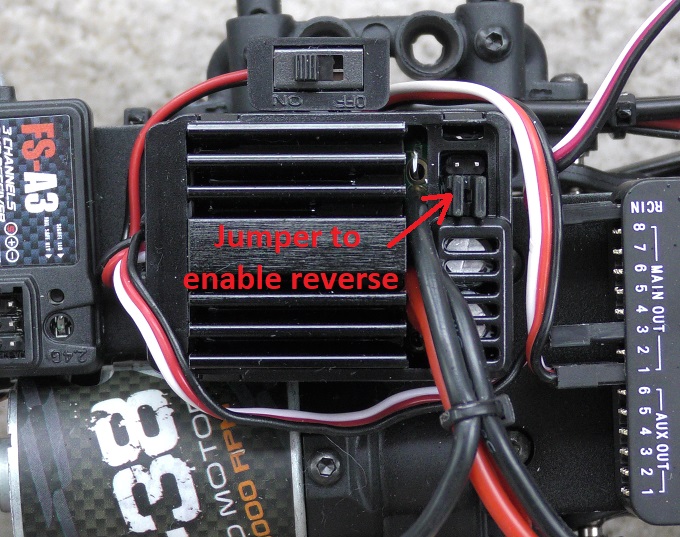
该框架显然包括以下内容 WP-1040-拉丝电调 反向 "跳线的设置如下图所示。
使用的固件:Rover-3.4.1
参数文件: 雷霆虎-丰田(Toyota)-路虎(Hilux-Rover)
该参数文件可通过Mission Planner地面站加载:
启动Mission Planner地面站并连接(飞行)控制器
打开 "配置/飞行稳定调整">> 完整参数树页面
从右侧中间的下拉菜单中选择 "ThunderTiger-ToyotaHilux-Rover",然后按下 "加载预存 "按钮
警告
上述参数文件包括设置 欧里亚特 参数 "4"(偏航/航向 180),因为如果 GPS 箭头朝后,布线会更方便