概述¶

"这款" Vac-U-Tug 是首个 ArduRover Boat 项目的理想选择。它空间宽敞,有针对缺乏经验的建造者的全面建造说明,通常不需要对 ArduPilot 电子元件进行大量防水处理。它绝对不是一艘快艇,但却是一艘出色的湖泊/池塘长期巡航艇。
部件清单¶
该套件包括传动系统,还需要添加
一个标准尺寸的伺服器
带反向("1060 "型)的有刷电调,例如 此:

(飞行)控制器控制器.这次建造使用的是 Omnibus F4 Pro。
全球定位系统:任何带指南针的 UBLOX MN-8 级 GPS。BN-880 就是一个例子,也是这次建造中使用的。
接收器:任何 3 通道或更多通道的 TX/RX 系统。通道越多,可实现的辅助功能就越多,如自动航点学习等。标准的飞机无线电也能很好地工作。
遥测(可选但推荐):3DR或其他遥测无线电系统,或通过接收器(如果它具有该功能),如Dragonlink(双向)或FRSky(仅下行链路)。用运行地面控制站的手机指挥船只非常有趣。
电池6 节 2000mah 镍氢电池可提供 1-2 小时的运行时间,最高速度为 2-3 公里/小时。3S 3000mah LIPO 电池可提供额外的速度和动力(或许可用于救援残疾船只并将其推到岸边)。
FPV 设备(可选):微型摄像机和视频发射器。在大多数情况下,5.8GHz 200mw 发射器可提供足够的拍摄范围。参见 第一人称视角 (FPV) 了解更多信息。
建设¶
建造过程完全按照制造商的说明进行,只有一些小的偏差:
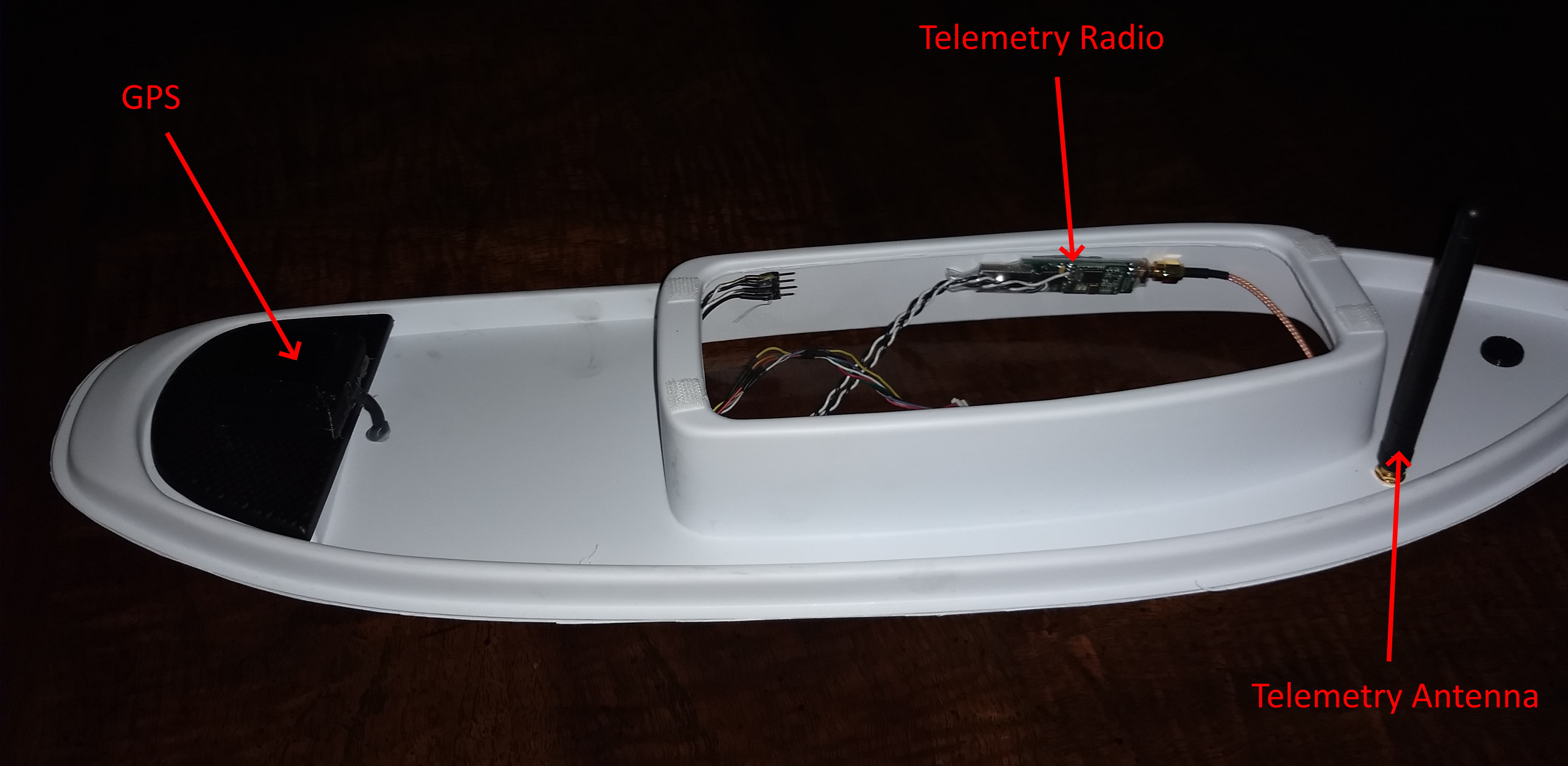
将遥测无线电安装在上甲板上,然后再粘接到下甲板上
对 GPS 进行防水处理,因为如果海浪冲向船只,GPS 最有可能被打湿。我用 3D 打印了一个小塑料盒,将 GPS 密封在里面,确保周围防水。
在压载步骤中,为了避免在顶甲板上装填压载杯时翻滚,应将操作分成两个或多个步骤:将部分压载装入塑料袋中,以便在稍后的步骤中将其与环氧树脂混合,然后将塑料袋放在压载杯下方的船体内,再继续装填最后的压载量。保持低重心。
其他建造步骤¶
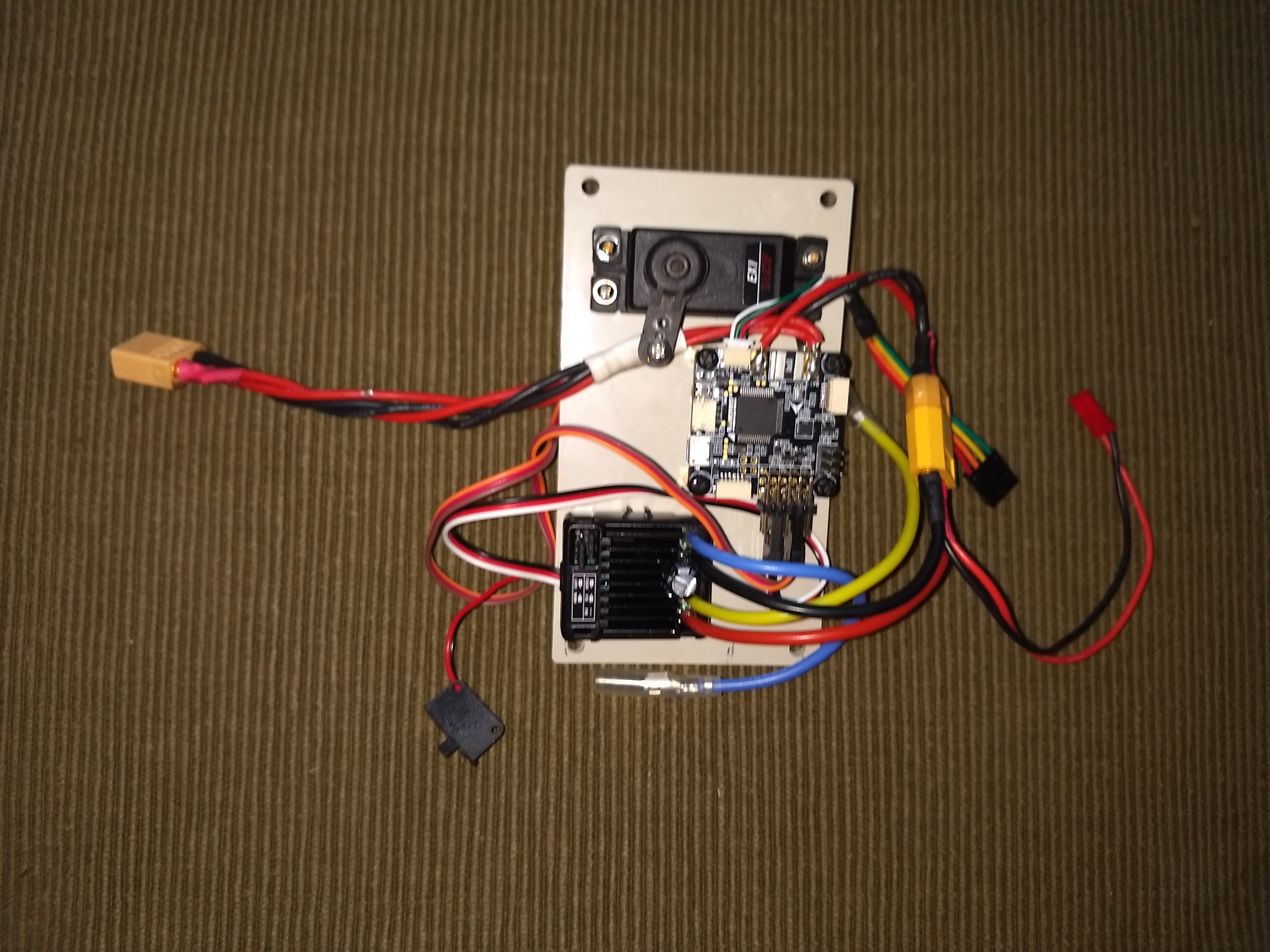
如下图所示,将(飞行)控制器控制器安装在电子甲板上。
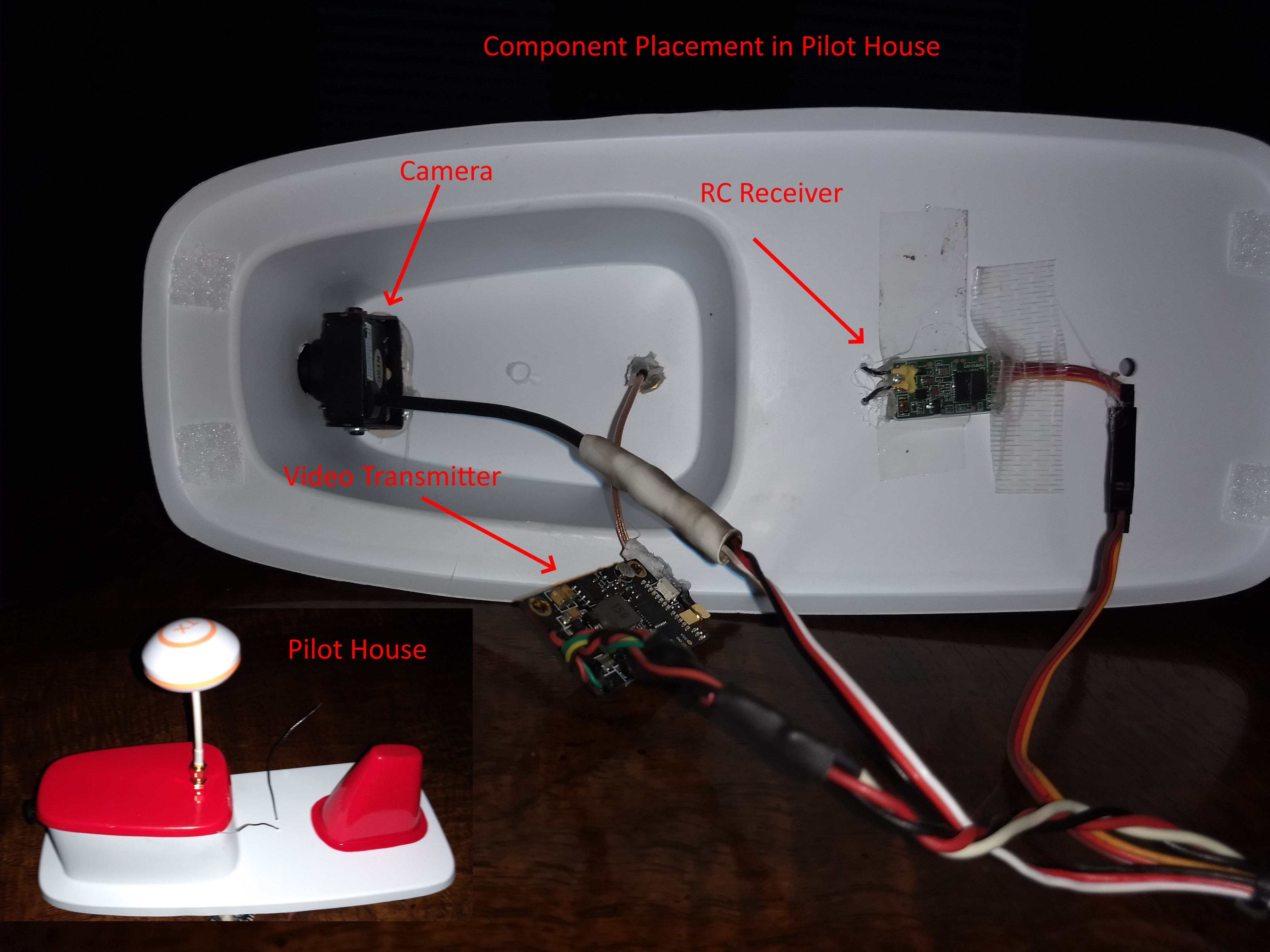
如下图所示安装摄像头和视频发射器。在安装视频发射器的天线之前,请先油漆和粘合驾驶室屋顶。确认摄像机的方向和功能正确后。在引航员舱出口孔周围做防水处理。热胶效果很好,将来需要时还可以拆除。
如下图所示确定组件的位置。将 GPS、视频发射机和遥测发射机分开可防止这些系统之间产生任何干扰。
设置步骤¶
安装固件
设置 框架类型 =2艘船。
将转向伺服器连接到 PWM 输出 1,将电调连接到输出 3。
设置 方向m 方向(在本产品中,USB 接口朝前的方向为 6)
进行加速度计、罗盘和遥控校准。
设置控制模式。在此构建中,使用了手动、保持、着陆、转向、Acro 和自动模式。
根据需要设置节流阀故障保护和低电量故障保护。设置所需的故障保护动作。
为节气门学习设置辅助开关。
设置 GCS_PID_MASK = 1.用于今后调整转向控制器。
在工作台上,确保所有模式都能正常工作,在 ACRO 模式下,当您改变船的航向时,转向伺服器会朝着正确的方向移动,在 MANUAL 模式下,也能在遥控控制下移动。
第一次浮动¶
确认在手动模式下航行操作正常。从 TX 调整转向至直线巡航。然后在地面控制站(GCS)中设置转向伺服器的 SERVO1_TRIM 与 SERVO1 在中性 TX 杆上的输出值相一致。然后设置 RC1_TRIM (假设未进行遥控重映射)到中性杆时的通道值,然后将微调归零。
接下来在 ACRO 中航行。在低速航行时,确定转弯率,即一个完整的转弯需要多少秒除以 360,并将其输入到 ACRO_TURN_RATE 参数。
此时,导航控制器中的默认设置就能很好地调整导航和返回原点。进一步 飞行稳定调整导航 如果需要,也可以这样做。