跟拍模式(已启用 GCS)¶
通过 "跟我走 "模式,您可以使用遥测无线电和地面站,让旋翼飞行器跟随您移动。
备注
与其他自动驾驶模式不同,该功能由地面站实现。地面站通过使用 MAVLink 遥测技术读取飞行器位置,并发送 "引导 "模式指令来控制飞行器的移动。目前支持这种功能的有 Mission Planner地面站 适用于 Windows 笔记本电脑,APM Planner 适用于 OS X 笔记本电脑,DroidPlanner 适用于 Android 设备。
您将需要¶
Mission Planner地面站须知¶
将其中一种飞行模式设置为 "闲置 "模式
设置您的 Copter 并通过无线遥测建立 MAVLink 连接
确保 GPS USB 加密狗或蓝牙设备已插入笔记本电脑,并显示为串行端口。使用模块附带的软件,确保模块正常工作,并确保 GPS 锁定。
起飞,在空中切换到 "闲置 "状态。(确保有足够的高度,以保证无人机不会伤害到你)。
在Mission Planner地面站的 "飞行数据 "屏幕中,尝试右键单击附近的一个点,然后选择 "飞往此处"。如果成功了,您就可以尝试 "目标跟随Follow me "模式了。
在Mission Planner地面站中输入 Control-F 打开以下窗口。点击 "目标跟随Follow me
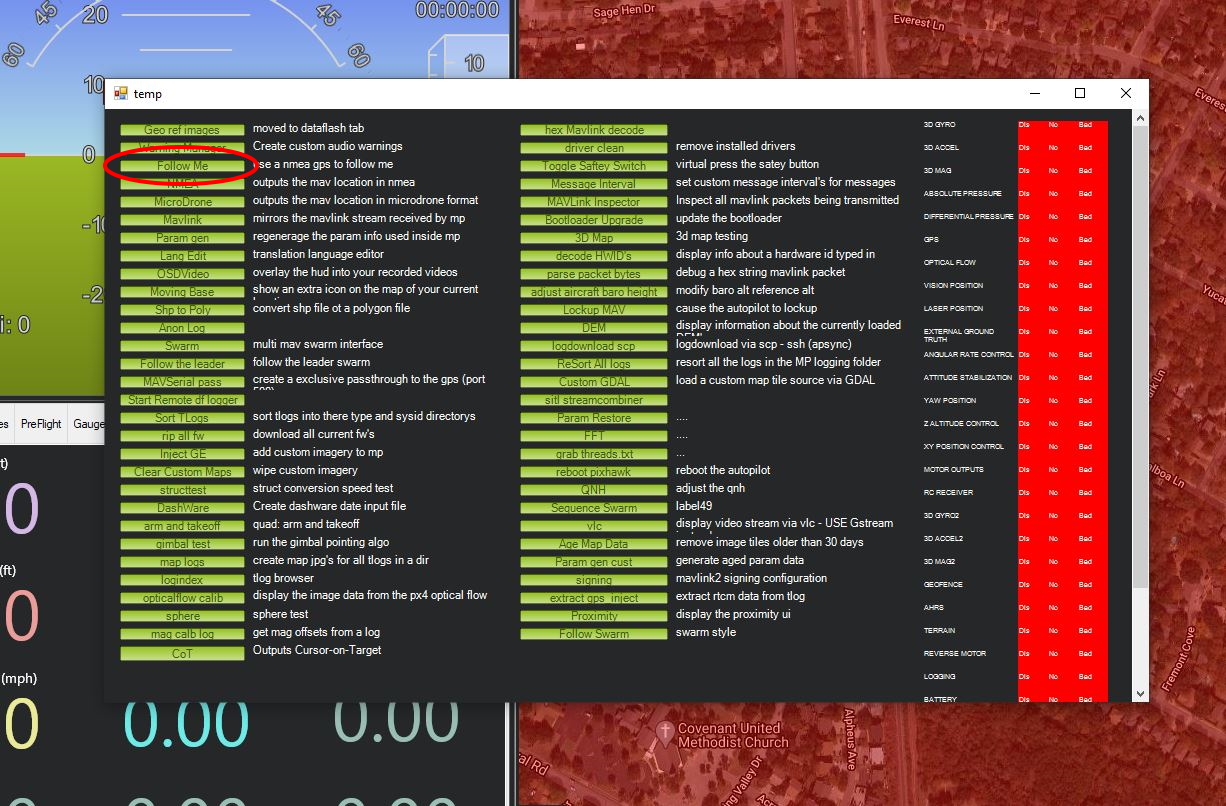
这将弹出此窗口。选择分配给 GPS 设备的串行端口及其使用的波特率。
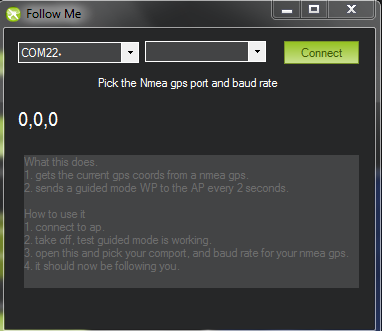
点击 "连接 "后,Mission Planner地面站将从设备读取 GPS 数据,并以每两秒发送一次 "飞到这里 "指令的形式发送给您的 Copter。
现在,拿起你的笔记本电脑,开始四处走走吧。
旋翼飞行器应该会跟着你!
确保设置足够的高度,以防受伤。
如果设置了适当的高度,就可以让它跟着你,并试图超越它!
警告
气压计用于计算海拔高度,这意味着它会随着时间的推移而漂移,并影响上升的地形。请注意障碍物和海拔变化。保持高度的行为类似于位置悬停模式。