引导模式¶
制导模式是 Copter 的一项功能,可通过遥测无线电模块和地面站应用程序以无线方式动态引导 Copter 到达目标位置。本页提供使用制导模式的说明。
备注
LUA 脚本和配套计算机也可使用引导模式来指挥载具移动和导航。
概述¶
制导模式不是传统的飞行模式,不能像其他飞行模式一样分配到模式开关上。制导模式功能是通过地面站应用程序(如Mission Planner地面站)和一个 遥测无线电.这项功能允许飞行员通过点击任务规划飞行数据地图上的一个点,以交互方式命令旋翼飞行器飞往目标地点。一旦到达目标位置,旋翼飞行器就会在该位置盘旋,等待下一个目标。"跟着我 "模式还可使用 "引导模式",让旋翼飞行器跟随飞行员在场地周围飞行。
您将需要¶
要使用引导模式,您需要一个 遥测无线电 允许您的计算机和(飞行)控制器在飞行过程中进行通信的地面站计算机或平板电脑,以及地面站应用程序,如 Mission Planner地面站.
说明¶
在野外架设您的旋翼飞行器,并在旋翼飞行器和笔记本电脑之间通过无线遥测建立 MAVLink 连接。
在笔记本电脑上使用遥测模块附带的软件,确保其正常工作,并确保 GPS 锁定。
起飞 位置悬停模式 并爬升到安全高度
在Mission Planner地面站飞行数据屏幕地图上,尝试右键单击附近的一个点,然后选择 "飞往此处"。
系统将要求您输入引导模式高度。输入高于原点的高度(以米为单位)。
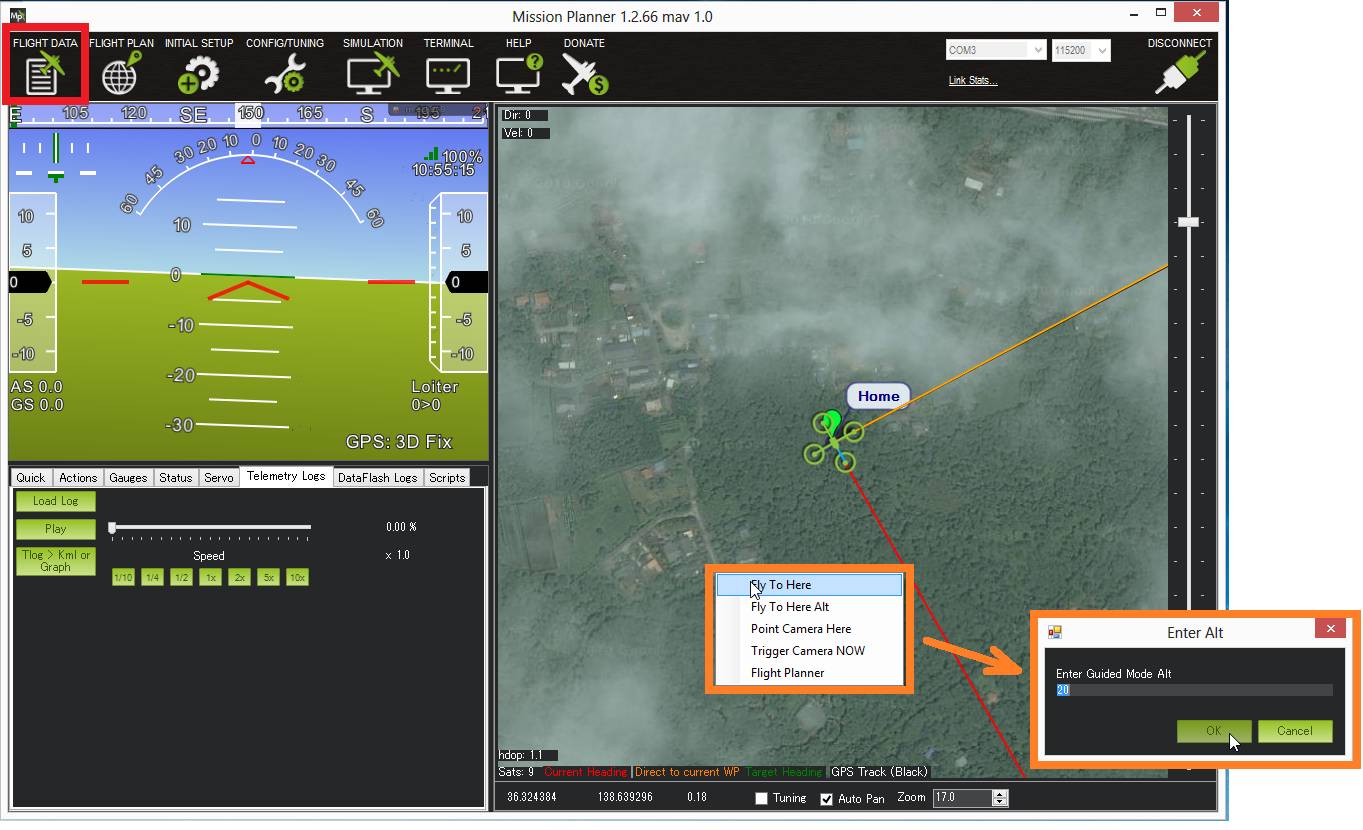
地图上应出现 "引导 "目标,橙色线(表示目标航向)应指向该引导目标。

载具应飞到目标地点,并在那里等待,直到您进入另一个地点或切换到另一种模式。
备注
关于 Mission Planner地面站 无需将飞行模式之一设置为 "制导"。其他地面控制站的情况可能并非如此。
引导模式选项¶
"这款" GUID_OPTIONS 参数可以改变几种引导模式行为:
位 |
意义 |
|---|---|
0 |
允许从发射机上膛 |
2 |
忽略飞行员偏航输入 |
3 |
SetAttitudeTarget 将 Thrust 解释为 Thrust |
4 |
不要稳定位置 XY |
5 |
不要稳定 VelocityXY |
6 |
用于定位目标的航点导航 |
7 |
允许风化 |
第 0 位(例如 "1")允许遥控发射机在制导模式下上膛
第 2 位(例如 "4")禁用飞行员使用遥控发射机改变飞行器航向的功能
第 3 位(如 "8")改变了对 SET_ATTITUDE_TARGET MAVLink 命令的 主要内容 字段,而不是爬升率。参见 制导模式下的旋翼飞行器指令 更多详情
第 4 位(如 "16")禁用位置控制器的 XY 轴位置误差修正。如果外部控制器提供的高速目标已包含位置误差修正功能,则该功能将非常有用。
第 5 位(如 "32")与上述相同,但会影响位置控制器的速度误差修正
第 6 位(如 "64")启用 S 曲线路径规划(与 "S "中的 "64 "相同)。 自动模式) 达到位置目标。这可能会使加速和减速更加平稳,但位置目标无法快速更新。这也允许 物体避让路径规划 例如 弯弯尺 和 Dijkstras) 在导引模式下使用
第 7 位(如 "128")启用 风化
"这款" GUID_TIMEOUT 参数用于保存使用姿态、速度和/或加速度指令控制飞行器时的超时(秒)。如果在这么多秒钟内没有收到来自配套计算机的命令,飞行器将减速至停止(如果提供的是速度和/或加速度命令)或保持水平悬停(如果提供的是姿态命令)。默认设置为 3 秒。
导引_NoGPS¶
这种导引模式的变体不需要 GPS,但只接受 态度目标.由于它不像常规制导模式那样接受位置或速度目标,因此通常对普通用户没有用处。该模式专为可能希望飞行器在 AltHold 模式下飞行的配套计算机而设计。
备注
Guided_NoGPS 不允许载具在没有 GPS 的情况下保持位置(即非 GPS 导航)。有关 非 GPS 导航,请参见本维基页面