CUAV PW-Link¶

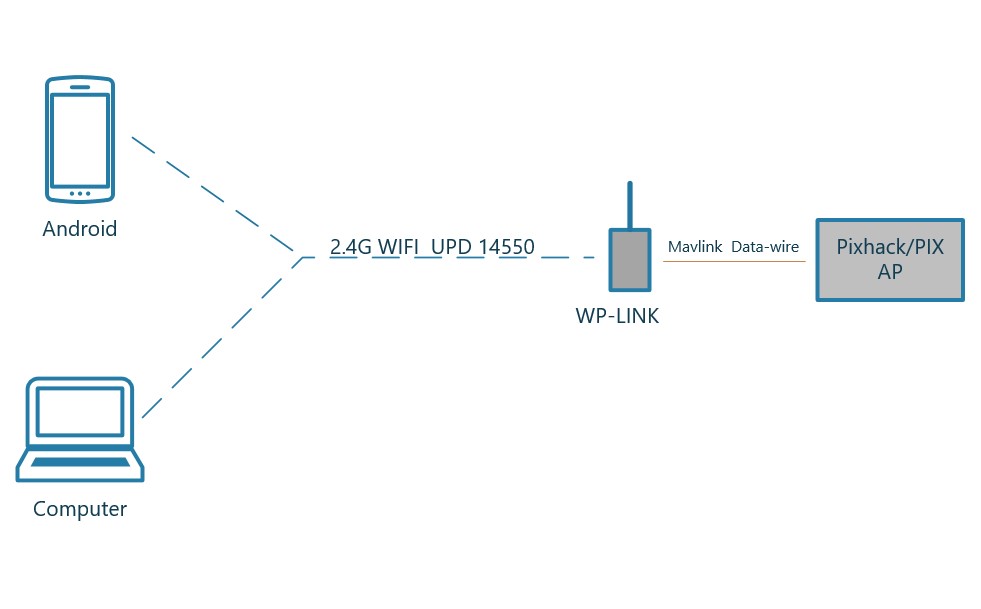
CUAV PW-LINK 是一款基于 ESP8266 的 2.4Ghz WIFI 遥测无线电。它使用 +5V、大地、TX 和 RX 信号连接到任何 ArduPilot 遥测端口。它以 57.6 Kbaud 的标准默认参数和 MAVLink2 遥测协议运行,通过 WIFI 以标准 Mission Planner/ QGC UDP 端口 14550 进行连接。
使用外置天线时,典型范围为 450 米。
连接地面站¶
打开电脑或 Android 手机上的 WIFI 连接对话框,然后选择 CUAVWLINKxxxx SSID 并使用密码连接 cuavwlink.连接后,使用 UDP 连接,端口 = 14550(默认端口),使用 Mission Planner 进行连接。QGC 将自动检测并连接。PW-LINK 的默认 IP 地址是 192.168.4.1.
MAVProxy¶
可使用以下命令将 MAVProxy 地面站连接到飞行器。
mavproxy.py --主人 :14550