非 GPS 导航¶
这些选项允许载具在没有 GPS 的情况下估计自己的位置。一旦启用,所有自主和半自主模式都可以使用,就像有 GPS 时一样。
备注
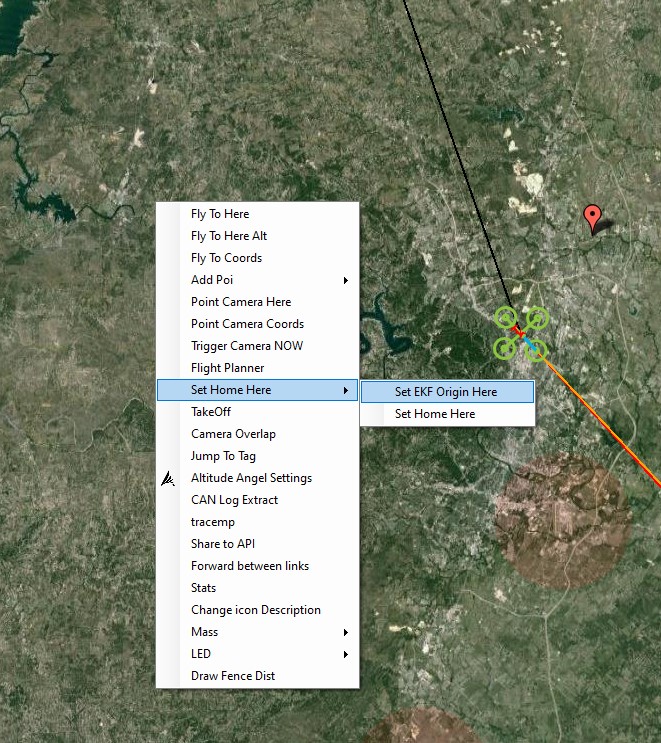
上述大多数系统(信标除外)都要求手动设置起源,除非有 GPS。要做到这一点,用户必须使用 GCS 设置起源(如下图所示,使用Mission Planner地面站),或者使用如下的 lua 脚本 一种
备注
大多数(飞行)控制器使用的低成本 IMU(加速度计、陀螺仪、罗盘)漂移太快,在没有外部速度或位置源的情况下无法进行位置估计。换句话说,低成本 IMU 本身不足以估计位置。
备注
要运行非 GPS 导航功能,必须使用闪存大于 1MB 的板卡,但 Vicon 除外,因为 1MB 板卡仍支持 GPS_INPUT 信息,尽管它们不支持 GLOBAL_VISION_POSITION_ESTIMATE,因此必须使用 GPS_INPUT 信息运行。请参见 固件限制 了解详情。