大和卷扬机¶

"这款" 大和卷扬机 是专为无人机投递设计的高质量卷扬机。卷扬机包括一个 "线端检测开关",可防止线拉得太紧,从而拉伤设备或弄断线头。夹持器包括一个弹簧装置,当包裹接触地面时会自动松开。
重量:630 克
尺寸宽:110 毫米 高:82 毫米 深:72 毫米
最大有效载荷8 千克
最大功率:55 瓦
输入电压: 7.2V ~ 22.2V
接口4xPWM 或 UART
在日本设计和制造
备注
该卷扬机的驱动程序将随 Copter-4.1.0 一起发布。对于早期版本,卷扬机可以使用(飞行)控制器的伺服输出来控制,这样就可以通过飞行员的发射机和/或 DO_SET_SERVO 任务指令来操作卷扬机。
购买地点¶
连接和配置¶
将卷扬机连接到(飞行)控制器,如下图所示
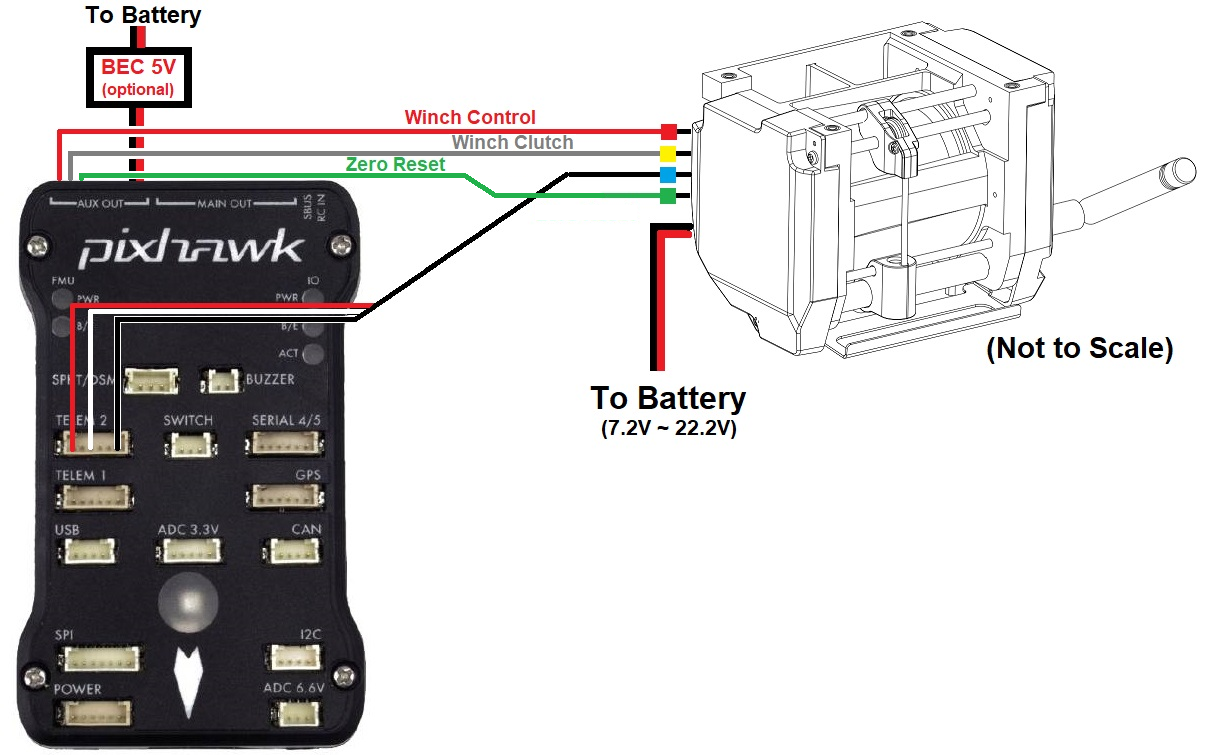
将 3 针卷扬机控制线(红色电缆扎带)连接至辅助输出 1(又名伺服 9)。
将 3 针卷扬机离合器线(黄色电缆扎带)连接至辅助输出 2(又名伺服 10)
将 3 针卷扬机归零复位线(蓝色扎线带)连接至辅助输出 3(又名伺服 11)。
将 3 针卷扬机遥测线(蓝色电缆扎带)连接到自动舵的 Telem2(或任何其他遥测端口)
用于校准卷扬机的归零器(绿色电缆扎带)应保持断开状态
需要 7.2V 至 22.2V 的电源为电机供电
可选择将 5V BEC 连接到(飞行)控制器的伺服轨道,为卷扬机电子设备供电。如果连接了遥测线,则不需要这样做。
设置以下参数
卷扬机类型 = 2 (Daiwa)
servo9_function = 88(卷扬机)
SERVO9_MIN = 1000
SERVO9_TRIM = 1500
SERVO9_MAX = 2000
servo10_function = 133(卷扬机离合器)
SERVO10_MIN = 1000
SERVO10_TRIM = 1500
SERVO10_MAX = 2000
servo11_function = 0(禁用)
SERVO11_MIN = 1000
SERVO11_TRIM = 1500
SERVO11_MAX = 2000
serial2_protocol = 31(卷扬机)。注意,这假定卷扬机的遥测连接到 SERIAL2,在大多数电路板上通常是 TELEM2。请注意,这并不一定与某些电路板上的 UART2 相对应。
SERIAL2_BAUD = 38(38400 波特)或 115(115200 波特),视卷扬机型号而定。
RC6_OPTION = 45(卷扬机控制),以便通过发射机的通道 6 旋钮控制卷扬机速度
RC6_DZ = 30.该死区用于检测驾驶员是否移动了卷扬机控制旋钮,以便从自主操作中夺回控制权。
RC8_OPTION = 44(卷扬机启用),通过将发射机通道 8 开关拉至低电平来放松卷扬机
卷扬机选项¶
"这款" 卷扬机选项 当参数中的以下位被设置时,该参数将提供卷扬机可能配置选项的位掩码:
位 |
选项 |
|---|---|
0 |
启动时自由旋转允许在启动后拉出缆线。这是当前的默认设置,但实际上非常恼人,因为我们需要记住在起飞前松开离合器,否则包裹很可能会留在地面上。 |
1 |
当卷扬机的任何重要状态发生变化时(健康、向上或向下移动、离合器位置、线的长度),"详细 "输出会向 GCS 发送文本。这是正常遥测卷扬机信息之外的信息(见下文) |
2 |
卡住时重试(仅限 Daiwa) |
所有选项默认为激活状态。
卷扬机遥测¶
卷扬机的状态可通过Mission Planner地面站或 QGC 的 MAVLink Inspector 窗口实时查看。如果使用Mission Planner地面站,则按下 "设置"、"高级 "下的 "MAVLink 检查器 "按钮。
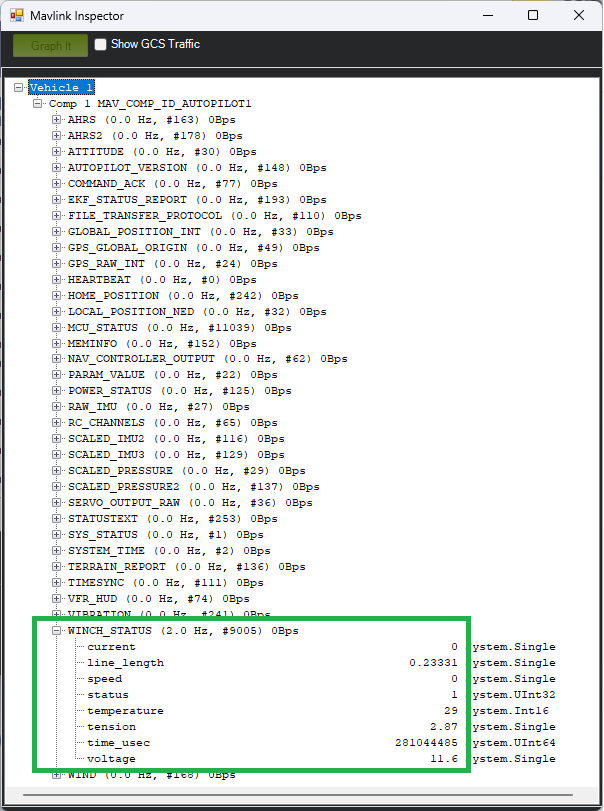
卷扬机的电流消耗、线路长度、电流速度(米/秒)、温度和电压都可以显示出来。
清零复位线长度¶
卷扬机会不断估算已展开的缆线长度,一旦估算的缆线长度为零,卷扬机就会停止缩回缆线,以防止缆线断裂。不过,这种估计值容易发生偏移,这意味着您可能无法完全缩回缆绳,或者(可能性较小)缆绳缩回过长而导致断线。为避免出现这些问题,应使用以下步骤定期将测线长度估计值重置为零:
为(飞行)控制器和卷扬机供电
连接Mission Planner地面站,打开 "设置"、"高级 "屏幕,按下 "MAVLink 检查器 "按钮,检查当前线路长度。
将缆线缩回(也许可以使用 RC6 飞行稳定调整旋钮)至理想最小长度的 20 厘米左右范围内
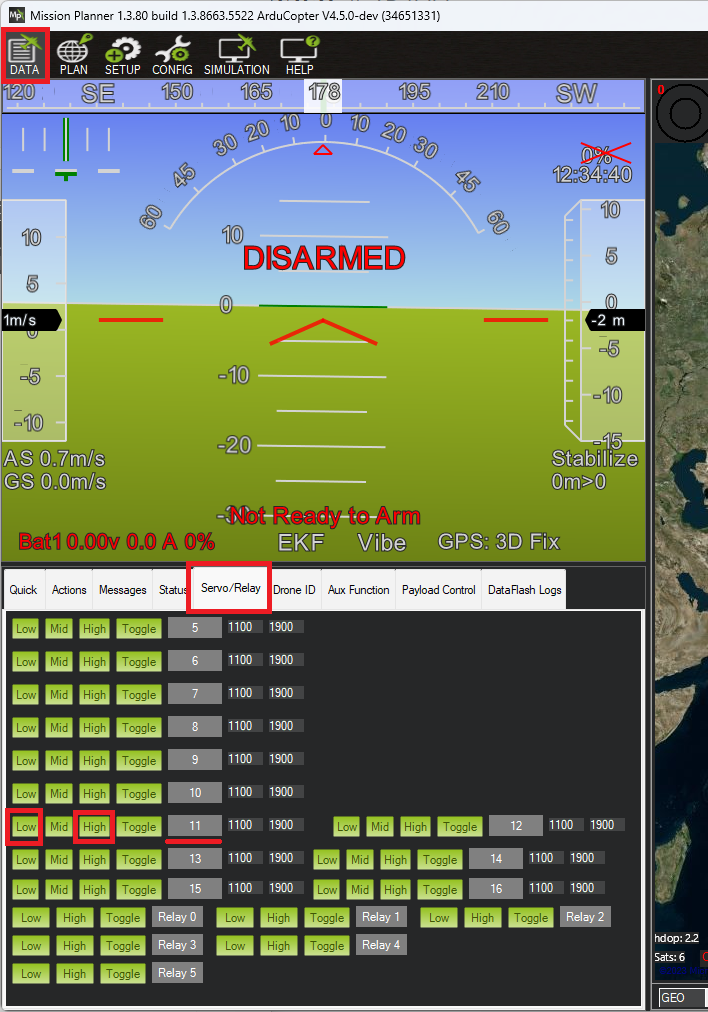
打开Mission Planner地面站的 "数据"、"伺服/中继 "选项卡,找到输出 11 的行
按下 "高 "按钮,同时收回测线并将测线长度重置为零
按下 "低 "按钮,收回管线
任务期间的控制¶
在执行自主任务时,可以使用 DO_WINCH 任务命令来控制卷扬机。请参阅 旋翼飞行器任务指令列表 更多详情
卷扬机测试 Lua 脚本¶
如果载具远在遥控范围之外,且没有使用操纵杆,则可以使用 winch-test lua 脚本 可能很有用,可以使用Mission Planner地面站的辅助功能页面手动升高或降低航线。