降落伞¶

本主题介绍如何设置手动和自动降落伞释放。
警告
降落伞弹射可能很危险。应谨慎使用该功能
以上视频来自 Henri's DIYDrones 讨论促使 Copter 添加了这一功能.
您将需要¶
像这样一个完整的降落伞装置:
或者,如果您更喜欢 DIY 解决方案,则需要可由 PWM 信号(即伺服)触发的降落伞释放装置,以及足以将多旋翼飞行器的速度减慢到 5 米/秒以下的降落伞。推荐一些降落伞供应商:
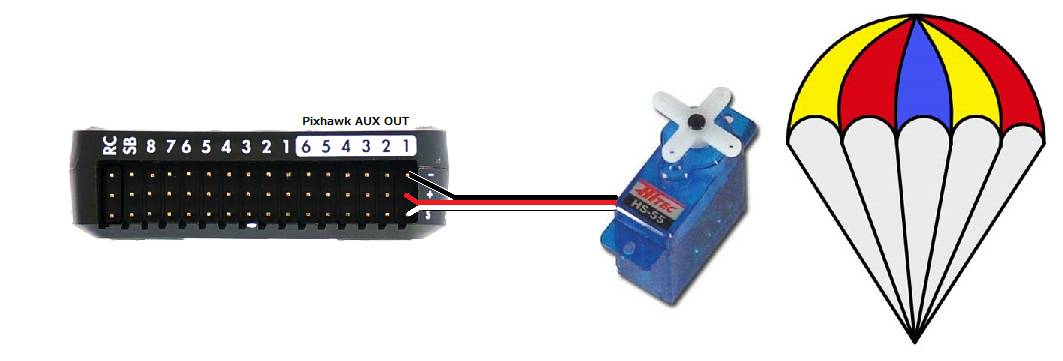
连接(飞行)控制器¶
降落伞释放装置可由继电器或 PWM(即伺服)触发。如果使用继电器引脚,请确保降落伞释放装置在高电平上处于激活状态,并且继电器引脚处于默认状态、 RELAY_DEFAULT 为 OFF 或无变化,以避免在初始化期间触发释放,因为在引导加载程序期间所有 GPIO 都被强制置低。
通过Mission Planner地面站进行设置¶
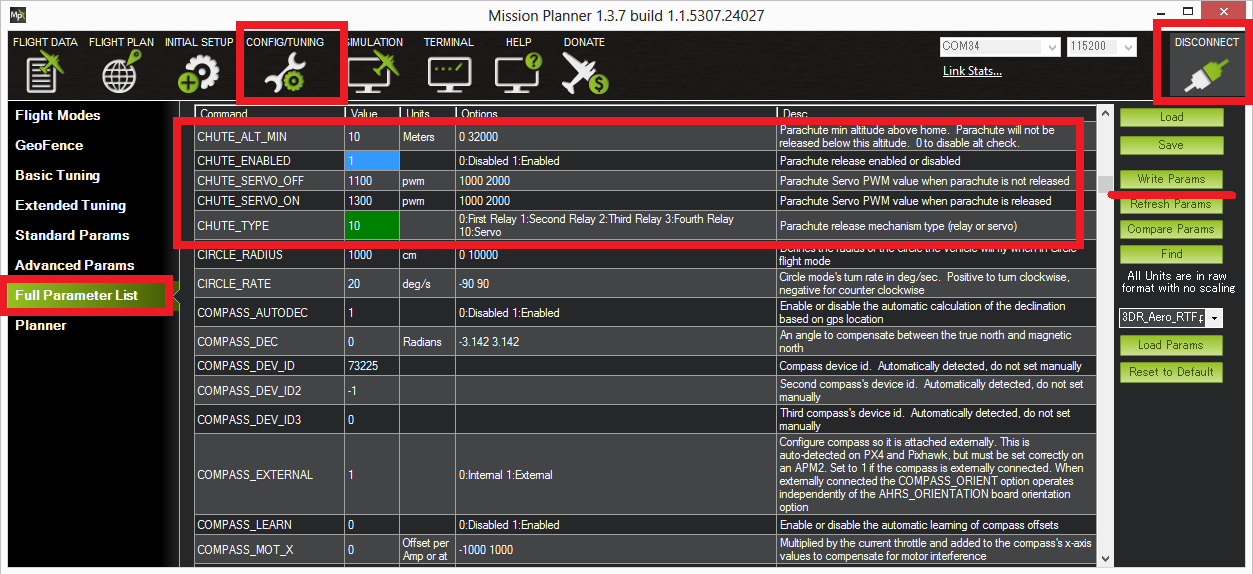
要配置降落伞释放,首先使用Mission Planner地面站连接(飞行)控制器,然后打开 CONFIG->全参数列表选项卡并设置以下参数。
CHUTE_ENABLED = "1".然后刷新参数或重新启动,即可看到滑道参数。
CHUTE_CRT_SINK 应设置为触发降落伞释放的下沉速度(米/秒)。
CHUTE_ALT_MIN 决定降落伞释放的最低高度。
伺服释放¶
CHUTE_TYPE = "10",用伺服释放
CHUTE_SERVO_ON 应设置为释放降落伞所需的伺服器位置
伺服关闭 应该是伺服器的 "静止 "位置。即释放降落伞前伺服器所处的位置
设置 servo9_function = "27".在配有 IOMCU 的(飞行)控制器上(输出端标有 MAIN 和 AUX)、
SERVO9指的是 Pixhawk 的 AUX OUT 1。要使用 AUX OUT2,请设置 servo10_function 至 27 等。
继电器释放¶
确定/配置引脚为 GPIO(参见 GPIO).
将该引脚设置为 RELAY 功能之一,即对于使用第一个 RELAY 功能的 GPIO 引脚 51,设置为 RELAY1_PIN = 51.
由于 GPIO 在启动加载程序期间最初总是设置为低电平,为避免意外释放,应始终使用需要高输出电平才能触发和设置的释放机制:
RELAY1_DEFAULT = 1 或 2(低电平或无变化),用于确定 RELAY1 引脚在启动后(飞行)控制器初始化期间的设置方式。
CHUTE_TYPE = 0、1、2 或 3,使用 RELAY、RELAY2、RELAY3 或 RELAY4 功能释放。

手动释放¶
飞行员可使用遥控通道/开关手动释放降落伞:设置一个 RCx_OPTION 为 22(降落伞释放)或 23(降落伞 3Pos)。无论哪种功能,当 RC 通道处于高电平(高于 CHUTE_ALT_MIN并已上膛(旋翼飞行器)或飞行(飞机)。有关要求,请参阅下一节。
MAVLink 命令发布¶
降落伞也可通过地面控制站指令释放/启用/禁用:MAV_CMD_DO_PARACHUTE(cmd id #208)。该命令有一个参数 1 字段,用于决定动作:
参数1 |
行动 |
|---|---|
0 |
关闭降落伞释放功能 |
1 |
启用降落伞释放功能 |
2 |
释放降落伞 |
该命令可以作为 DO_PARACHUTE 航点成为自动飞行任务的一部分。
遥控停用/启用降落伞¶
您可以使用遥控通道/开关禁用或启用降落伞自动释放功能:设置一个 RCx_OPTION 至 21。高电平启用自动释放功能,低电平禁用。手动释放不受影响。如果设置为 23(降落伞 3Pos),低位禁用,中间位置启用自动操作,高位将尝试强制释放,如上所述,假定启用条件如下。
降落伞何时展开?¶
当 "碰撞检查 "功能确定飞行器已失去姿态控制并开始下落时,发动机将停止运转,降落伞将自动展开。碰撞检查器触发降落伞释放必须在 1 秒钟内满足以下所有条件:
电机已启动(旋翼飞行器)或正在飞行(飞机)
载具未着陆(仅限旋翼飞行器)
飞行器未处于 FLIP 或 ACRO 飞行模式(仅限旋翼飞行器)
载具的滚动和/或俯仰角与目标倾斜角相差 30 度(仅限旋翼飞行器)
气压计显示飞行器没有爬升(在某些情况下,过大的气压噪声会阻止释放)(旋翼飞行器和amp;飞机)
载具高于 CHUTE_ALT_MIN 高度(旋翼飞行器和飞机)。如果值为 "0",则禁用此检查。
测试滑道¶
根据释放装置的不同,降落伞的展开可能会有危险,因此在进行这些测试时请小心谨慎,酌情拆除降落伞和飞行器推进器。
测试手动部署:
如果使用开关禁用释放功能,则启用降落伞释放功能
设置 CHUTE_ALT_MIN 参数为零,以禁用最低高度检查
在稳定模式下启动飞行器,并将油门提高到最小值以上(断开电机连接或拆除螺旋桨)(飞机不需要)。
使用上述手动遥控通道切换激活方法之一,或使用Mission Planner地面站 SERVO/RELAY 选项卡切换释放继电器、MAVLink 命令或设置释放伺服的 PWM。
您应该看到发动机停止,降落伞释放装置启动,如果连接了遥测功能,"降落伞:飞行数据屏幕的 HUD 上应显示 "降落伞:已释放!"。
要测试自动部署:
设置 CHUTE_ALT_MIN 参数为零,以禁用最低高度检查
在稳定模式下启动载具,并将油门提高到最小值以上
在下降过程中,以某种方式将载具倾斜至少 30 度(气压计显示载具正在下降)。
1 秒钟后,发动机应停止,降落伞伺服器将移动,如果已连接Mission Planner地面站,则 "降落伞:飞行数据屏幕的 HUD 上应显示 "降落伞:已释放"。
测试完成后,将 CHUTE_ALT_MIN 到所需高度(默认为 10 米)