简单模式和超级简单模式¶
本文介绍了 简单 和 超级简单 模式,并说明如何设置从遥控发射机选择这些模式。
概述¶
"简单 "和 "超级简单 "模式允许飞行员从自己的视角控制旋翼飞行器的运动,无论旋翼飞行器朝向何方。这对于尚未掌握根据飞行器朝向调整滚转和俯仰输入的新飞行员,以及在飞行器距离较远、航向不明显的情况下非常有用。
"简单 "和 "超级简单 "模式可与几乎所有飞行模式结合使用,但 Acro 和漂移模式除外(在这些飞行模式中,设置将被忽略)。
简单模式允许您在起飞时根据飞行器的航向控制飞行器,并且只依赖于良好的指南针航向。
超级简单模式允许您根据原点方向(即上膛位置)控制旋翼飞行器,但需要良好的 GPS 定位。
这两种模式都可以分配到特定的飞行模式开关位置,也可以通过以下方式启用/禁用 Ch7/Ch8 开关.
正常模式¶

在未启用 "简单 "或 "超级简单 "功能的情况下,飞行员的发射器摇杆输入将按照飞行器的方向应用。例如,在上图中,当飞行员向右滚动输入(红色)时,飞行器就会向右滚动。
当飞行器朝向与飞行员相同的方向时,控制飞行器相对容易,但当飞行器朝向飞行员时,缺乏经验的飞行员会感觉控制完全颠倒了。例如,如果飞行员输入向右翻滚,从飞行员的角度看,飞行器就会向左移动。
简单模式¶
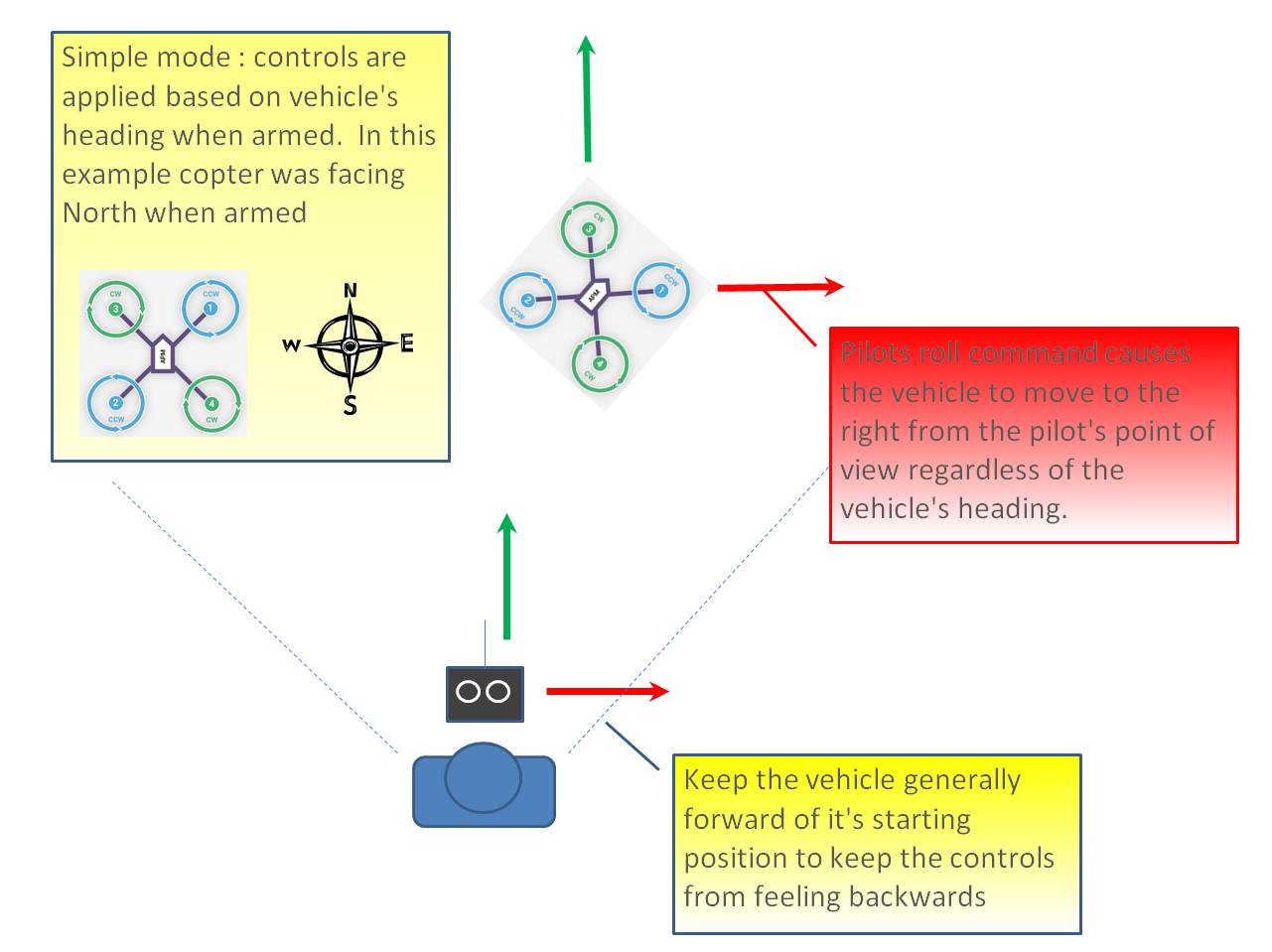
与其他系统上的 "无忧 "模式类似,该模式允许您在飞行过程中,无论当前航向如何,飞行器都会按照上膛时的方向飞行。因此,如果您向前握住俯仰杆,旋翼飞行器就会飞离您,向后拉俯仰杆,它又会飞回原地。您甚至可以使用偏航来使旋翼飞行器向任何方向旋转,但旋翼飞行器相对于摇杆输入的位置移动将与起飞时一模一样。
一般来说,在上膛时,您应该站在飞行器的后面,让飞行器的机头朝向远离您的方向。在飞行过程中,您应尽量让飞行器在起始位置前方飞行,因为如果飞行器在您身后飞行,所有的控制都会感觉反转。
如上所述,简单模式在紧急情况下也非常有用,因为在这种情况下,旋翼飞行器距离很远,很难确定其航向。
超级简单模式¶
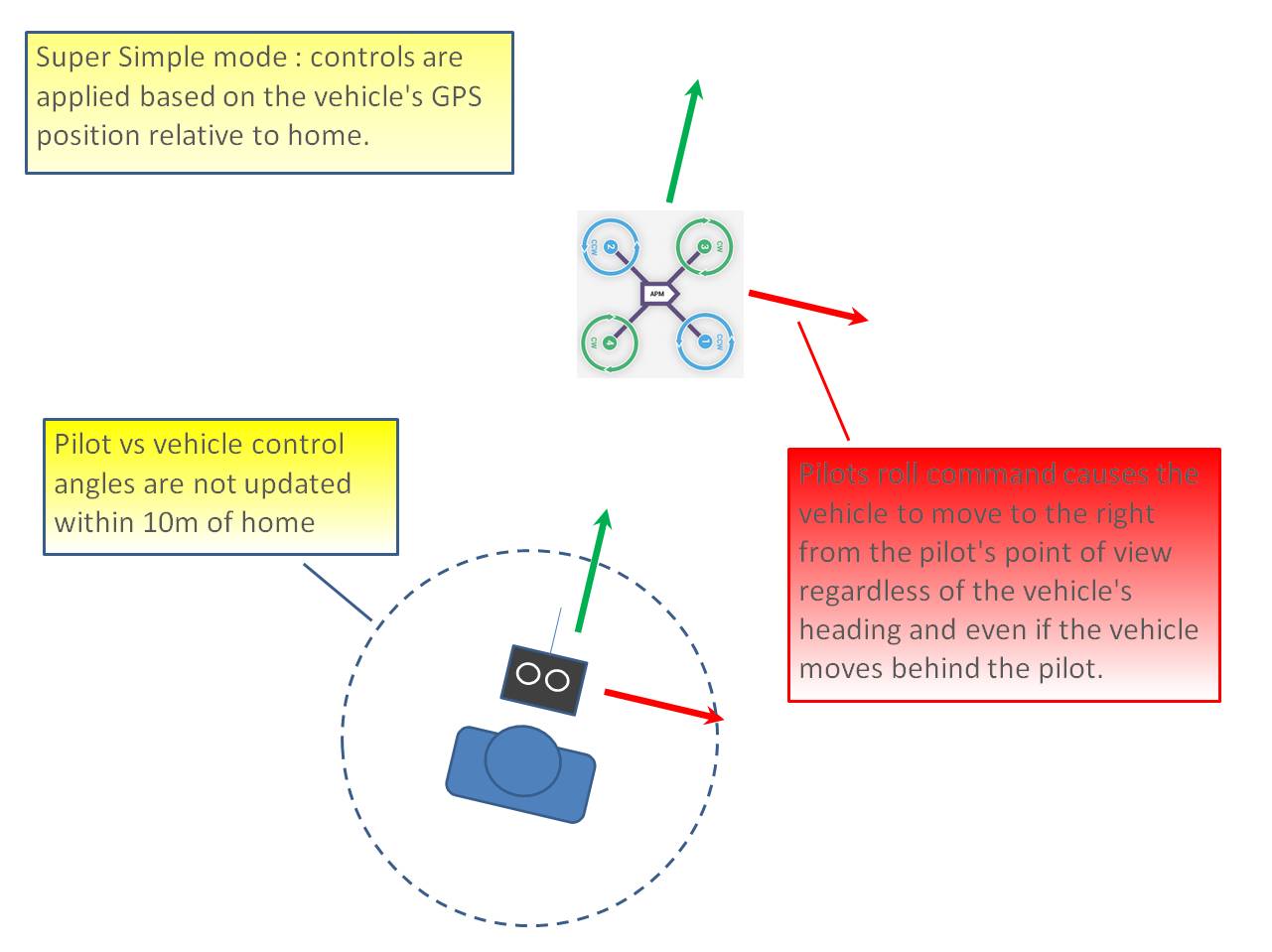
超级简单模式与简单模式相同,但它使用的是载具相对于原点的位置,而不是载具上膛时的初始航向。这意味着,无论载具处于什么位置,拉回俯仰角都会使其返回原点,而与载具的实际航向无关。
与简单模式相比,该模式的优势在于,即使旋翼飞行器飞到了飞行员/家庭所在位置的后方,也能从飞行员的视角进行控制。
如果驾驶员保持全速右滚,飞行器将围绕驾驶员顺时针飞行一圈(不过由于 "滞后 "原因,每绕一圈半径可能会略有增加)。
缺点是这种模式需要 GPS 锁定,因此起飞前应确保 GPS 锁定。
当载具距离原点 10 米以内时,方向不会更新,这意味着应避免近距离飞越原点。
为确保起飞时的控制正确无误,与简单模式一样,应让驾驶员站在飞行器后面,并让驾驶员和飞行器指向同一方向。
从发射机选择模式¶
发射机的 辅助通道 可以设置为选择简单模式、超级简单模式或两者。只需为这些模式设置一个辅助通道,该通道将覆盖在飞行模式屏幕上选择的简单/超简单选项。
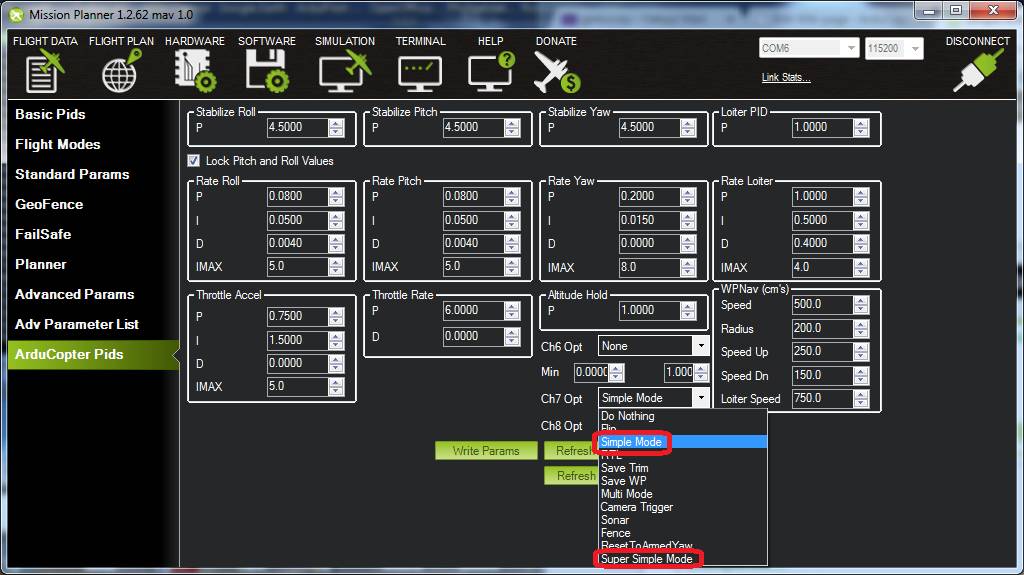
Mission Planner地面站:简单模式和超级简单模式的通道 7 选项¶
要支持从发射机只选择其中一种模式,可将该模式分配给映射到双位开关的通道(高电平 = 启用所选模式,低电平禁用)。要通过同一开关启用两种模式,请选择 超级简单模式 用于映射到 3 位开关(高位 = 超简单模式,中间位置 = 简单模式,低位 = 禁用)的通道。