反向推力设置¶
反向推力可在 "平面 "中用于任何自动节气门模式和自动着陆,和/或在飞行员控制下用于提供陡峭的下降而不增加空速。
要使用反向推力,电调必须具备这种功能。如果是这样,通常电调的输入输出将是对称的,正反向输出相等。例如,中心点 1500us 将是空转/停止,而不是非反向电调的半油门。
在本文的其余部分中,将以 RC 通道 3 控制节流阀和电机 esc 位于输出 3 上的典型设置为例。对于多个电机,参数也将用于这些输出编号。
设置¶
警告
在连接螺旋桨的情况下,切勿使用机械臂和电机设置!
首先是 SERVO3_MAX, SERVO3_MIN和 SERVO3_TRIM 必须根据连接到电调的输出适当设置。通常情况下 SERVO3_TRIM 值将设置零输出点(通常为 1500uS),而 SERVO3_MAX 设置最大前进点,而 SERVO3_MIN 设置最大反向推力点。
要使反向推力处于激活状态(向电调输出介于微调值和最小值之间的数值),则 THR_MIN 必须为负数,如下图所示。
接下来,必须决定如何对其进行控制。可供选择的方案有
飞行员用油门杆控制。超过零推力(空转)的油门杆位置将控制正向推力,低于零推力的位置将控制反向推力。在死区 (RC3_DZ)为零推力位置。这允许飞行员在非自动节气门模式(手动、FBWA 等)下控制进场或下降。
通过 ArduPilot 在自动油门模式(自动、巡航、FBWB 等)下的自动控制,可在不增加空速的情况下提高下降速度,特别是在自动着陆时,可在较陡的滑行斜坡上更精确地控制耀斑和预耀斑空速。
以上两点。
反向推力:飞行员控制¶
首先,必须了解非反向节流阀的输入到节流阀伺服输出的功能,当 THR_MIN 为零或正值,且未设置反向开关的 RC 选项 (RCx_OPTION = 64)(大多数飞机的通常情况)。
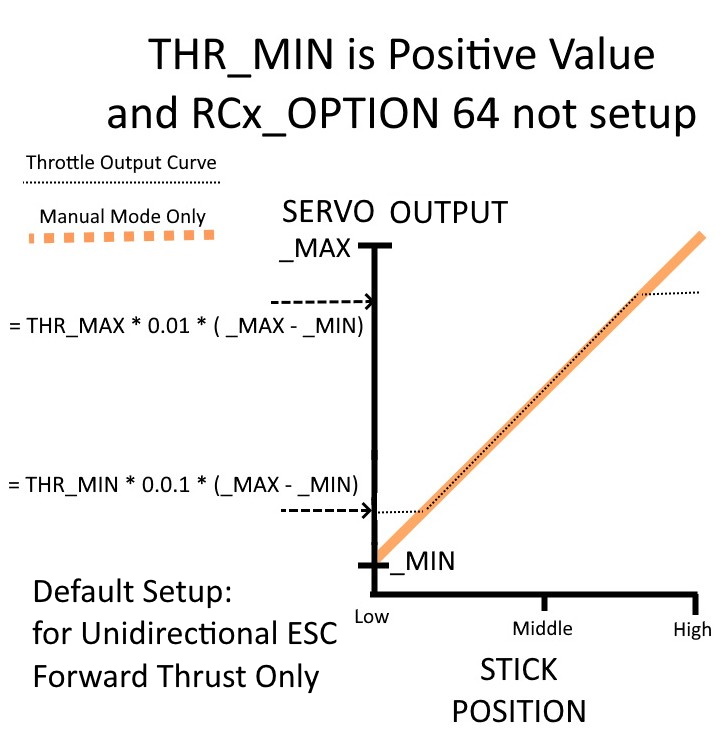
正常节气门设置¶
节气门杆的低位和高位与下列参数的标定值一致 RC3_MIN 和 RC3_MAX分别为上膛后,这些位置将产生为 SERVO3 设置的最小和最大输出值,并对应于电调校准后的零输出和全推力输出。请注意 RC3_TRIM 值在这种情况下不使用。
"这款" THR_MAX 和 THR_MIN 值限制了非手动模式下的输出值。如果 THR_MIN 可用于保持内燃机在低转速下运行,但允许在 MANUAL(手动)模式下切断。请注意,这些参数是输出范围的百分比。
为了使用飞行员的油门杆获得反向推力,将为反向电调设置伺服输出,SERVO3 的最大、微调和最小输出值设置如下所示。 THR_MIN 必须设置为负值,并在 MANUAL 以外的模式下,将低杆时的最大反向推力限制在反向输出范围的一定百分比内。同样、 THR_MAX 将设置 MANUAL(手动)以外模式下的最大正推力百分比。
"这款" RC3_TRIM 及其死区、 RC3_DZ这将确定不产生推力的摇杆位置范围,即 SERVO3_TRIM.
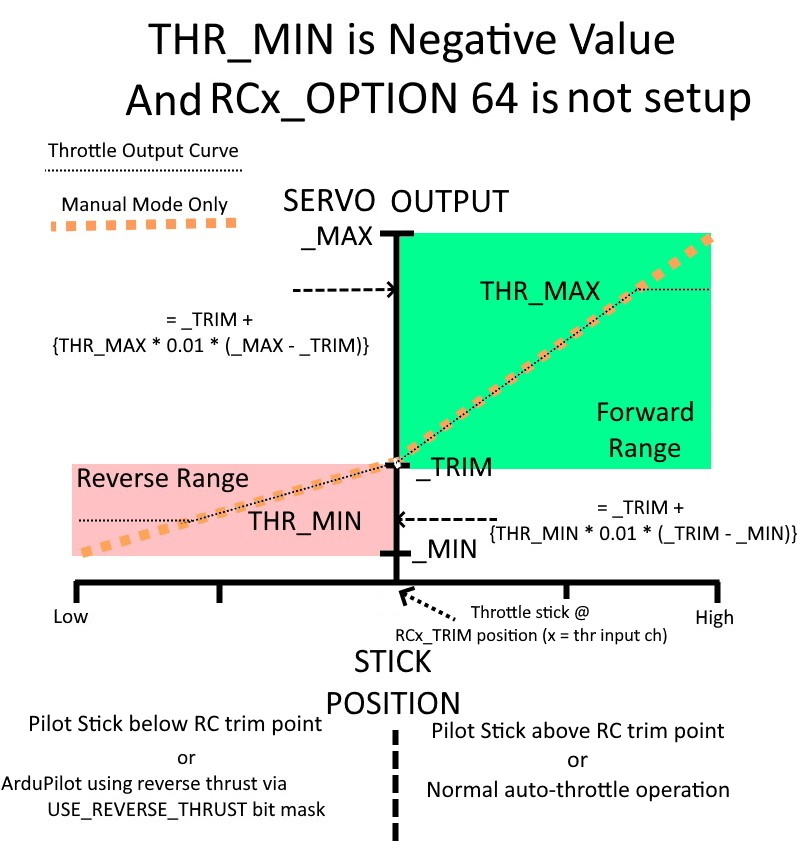
油门杆控制前进和后退推力¶
这在使用时可能会有点麻烦,因为将油门杆置于微调死区以停止电机产生推力可能会比较困难。因此,如下图所示,使用遥控开关选项来使用反向推力控制可以使操作更加简单。在这种情况下,遥控通道的 RCxOPTION 已设置为 64。在高位时,这会使油门杆控制反向推力,而不是正向推力。请注意,在这两种情况下,低杆位置(及其上方的死区)产生的推力均为零,而且 RC3_TRIM这也是无关紧要的。
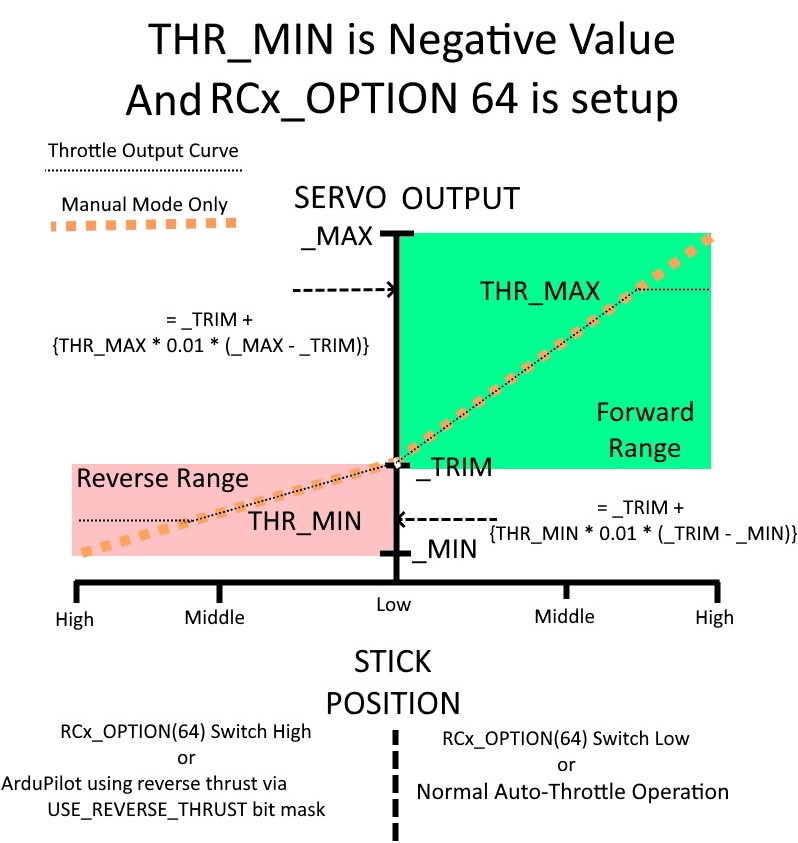
使用遥控选项改变油门杆以控制前进或后退推力¶
反向推力:(飞行)控制器控制¶
在自动油门控制模式下,包括在自动着陆过程中,(飞行)控制器还可以通过设置 USE_REV_THRUST 参数,如上图所示。
要实际使用此功能,必须使用空速传感器,并且 TECS_SINK_MAX 必须设置为 TECS_PITCH_MIN 和 最大风速 否则就会超载。(飞行)控制器将使用反向推力,最高可达 THR_MIN 以便在(飞行)控制器需要时获得最大下沉率。典型的配置还有 TECS_APPR_SMAX 高于 TECS_SINK_MAX 使巡航更加平稳,同时允许更陡峭、更有侵略性的斜坡着陆。
仅与飞行员控制的前推力一起使用¶
上文讨论的由(飞行)控制器控制的反向推力完全可以在不需要油门杆唤起任何反向推力的情况下使用。只需设置 THR_MIN 为最大反向推力,而 USE_REV_THRUST 然后根据需要设置 RC3_TRIM = RC3_MIN.油门杆过低时推力为零,油门杆过高时推力为正向,但(飞行)控制器仍可根据需要指挥反向推力。