使用Mission Planner地面站为图像添加地理标记¶
本文展示了如何使用以下工具为图像添加地理标记 Mission Planner地面站 将遥测日志中的数据注入 EXIF 标签。
概述¶
为图像添加地理标记后,就能更轻松地将拍摄的多张照片合并在一起。 传道室它对摄影测量、正射影像生成、三维地形建模等应用非常重要。
Mission Planner地面站 提供了两种从任务日志中为照片添加地理标记的方法:
数据闪存日志中的 CAM 信息
ArduPilot 可在预编程任务期间触发摄像头,或通过使用
做数码摄像机控制或do_set_cam_trigg_dist命令。相应的 CAM 信息存储在数据闪存日志中,Mission Planner地面站可利用这些信息为图像添加准确的地理标记信息。时间偏移(图像时间戳到日志时间戳)
这种方法利用摄像机内部时钟和系统时钟之间的时间差来确定每张图像在日志中的拍摄位置,并获取 GPS 信息。通常情况下,用户必须调整偏移值才能找到合理的结果。
提示
- 这种方法不太准确。当没有
摄像机与(飞行)控制器之间的连接。
备注
即使您的相机有内置 GPS,您也可以 可以 发现这种方法提供的信息比内置 GPS 更准确。
图像地理标记¶
常见的预备步骤¶
打开Mission Planner地面站,然后按 Ctrl+F.这将打开一个隐藏屏幕,如下图所示。
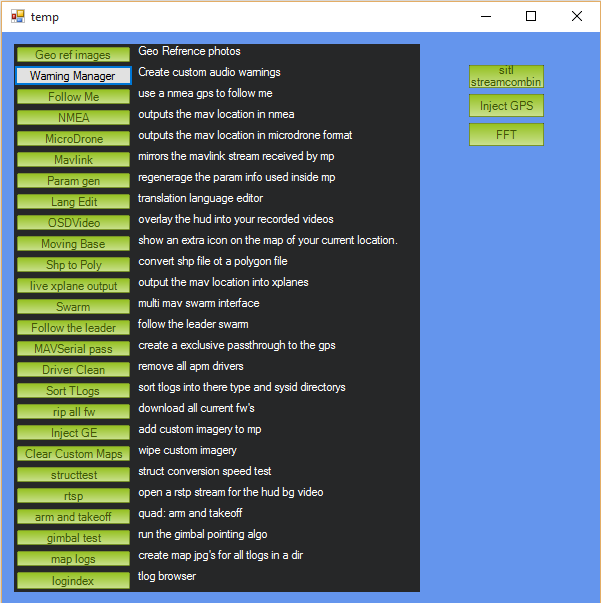
Mission Planner地面站:温度屏幕(Ctrl +F)¶
点击按钮 地理参考图像.它可以让您访问 地理标记 工具
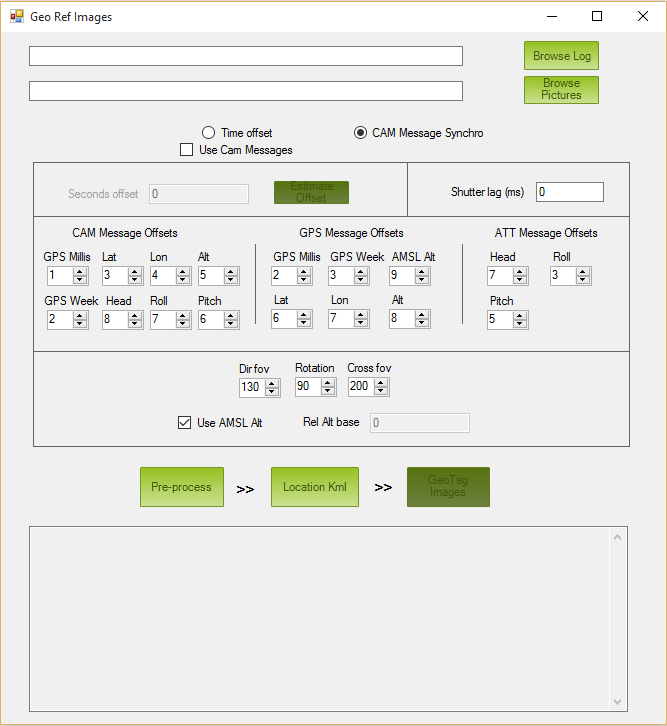
Mission Planner地面站:地理参考图像屏幕¶
点击按钮 浏览日志 并选择日志 (.tlog 或 .log) 与拍摄有关的飞行。
点击按钮 浏览目录 并选择从相机下载航拍图片的文件夹。
请注意,相机图片文件夹除了包含图片外,还可以包含其他文件。但就图片而言,它必须只包含属于航班的图片。
接下来的步骤取决于您使用的是 CAM 信息还是时间偏移。
CAM 信息¶
为了处理 CAM 信息,任务文件必须通过任何可用的任务命令(CAM_TRIGG_DISTANCE、DO_DIGICAM_CONTROL 等)定义为使用远程摄像机触发。
选择 CAM 信息 方法中未被选中。 地理标记模式 节。
如果知道快门时滞值(以毫秒为单位),请输入该值。如果不知道,请保留为 0
根据您的日志版本检查日志偏移是否正确(通常情况下没有问题)。
如果需要,输入 FOV 信息
选择 使用 AMSL Alt 复选框。否则,请取消选中
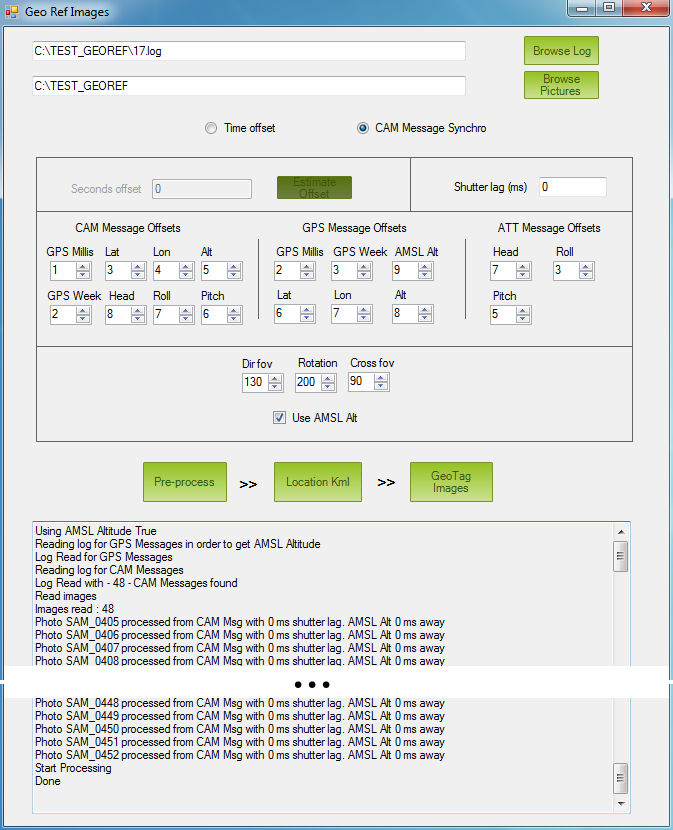
点击 预处理
如果预处理工作正常,您将看到 已完成 的末尾显示 过程信息区.
备注
在这种处理模式下,最常见的问题是日志中的 CAM 信息数量与文件夹中的图片数量不一致。如果工具发现两者不一致,就会输出错误信息并终止处理。
最后一步是使用 位置 Kml 按钮(见 常见的后期步骤 下同)。
时间偏移¶
提示
如果您还没有飞行过,一个有用的技巧就是同步摄像机和系统的时间。
选择 时间偏移 方法中未被选中。 地理标记模式 节。
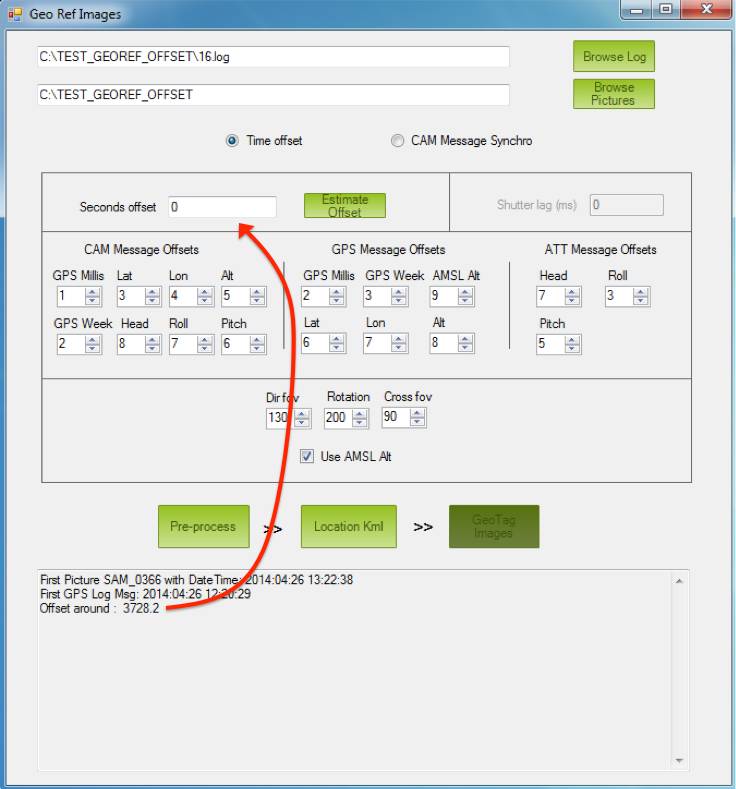
点击 估算抵消 按钮
该工具将计算(如上一节所述)第一张图片与日志中第一个 GPS 时间之间的时间差。
复制打印在 过程信息区 并将其粘贴到字段中 秒偏移
请看下图:
点击 预处理
如果预处理工作正常,您将看到 已完成 的末尾显示 过程信息区.
备注
使用这种方法时最常见的问题是使用了不准确的时间偏移。请记住,估计的时间偏移只是一个起点!
如果发现(飞行)控制器日志中没有的图片,Geotag 工具会发出警告--见下图:
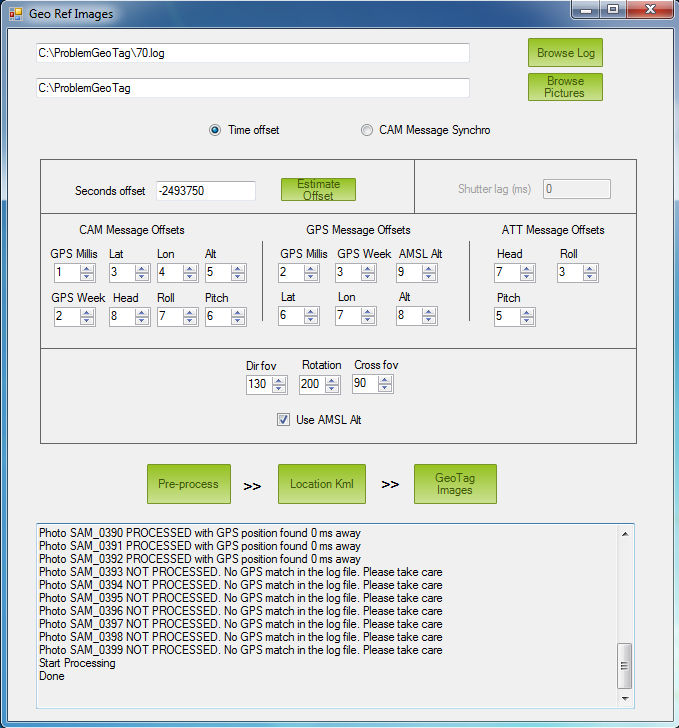
Mission Planner地面站:在指定偏移量的日志中未发现图像¶
最后一步是使用 位置 Kml 按钮(见 常见的后期步骤 下同)。如果建议的位置不正确,请在以下位置上增加或减少几秒钟。 偏移时间 并重复。
常见的后期步骤¶
其余步骤是检查建议的图片位置是否可接受,并将位置信息写入图片的 EXIF 数据:
点击 位置 Kml 按钮。Google Earth 将打开并显示建议的图片位置(如下图所示):
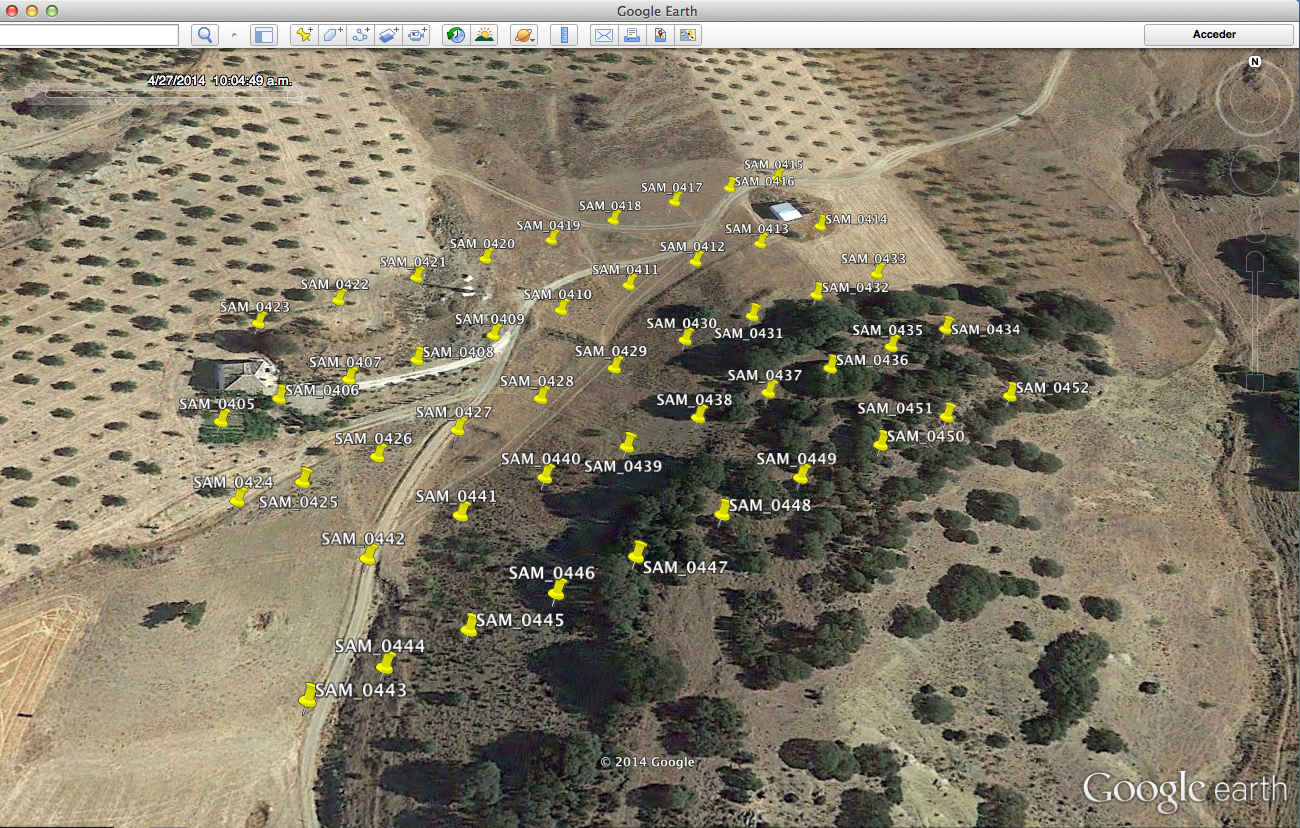
检查它们是否正常。如果您使用 CAM 信息 模式,应该不会有任何问题(如果有问题,只需按字母顺序排列图片,并检查列表中的第一张图片是否也是最旧的)。如果您使用 时间偏移请尝试在时间偏移中添加或减少秒数。
如果一切正常,点击 地理标签图像 按钮,并等待查看处理信息
地理 标记 完成.
地理标记文件可在 有地理标记 原始图片文件夹内的文件夹
界面概述¶
"这款" 任务计划地理参考图像 屏幕如下所示:
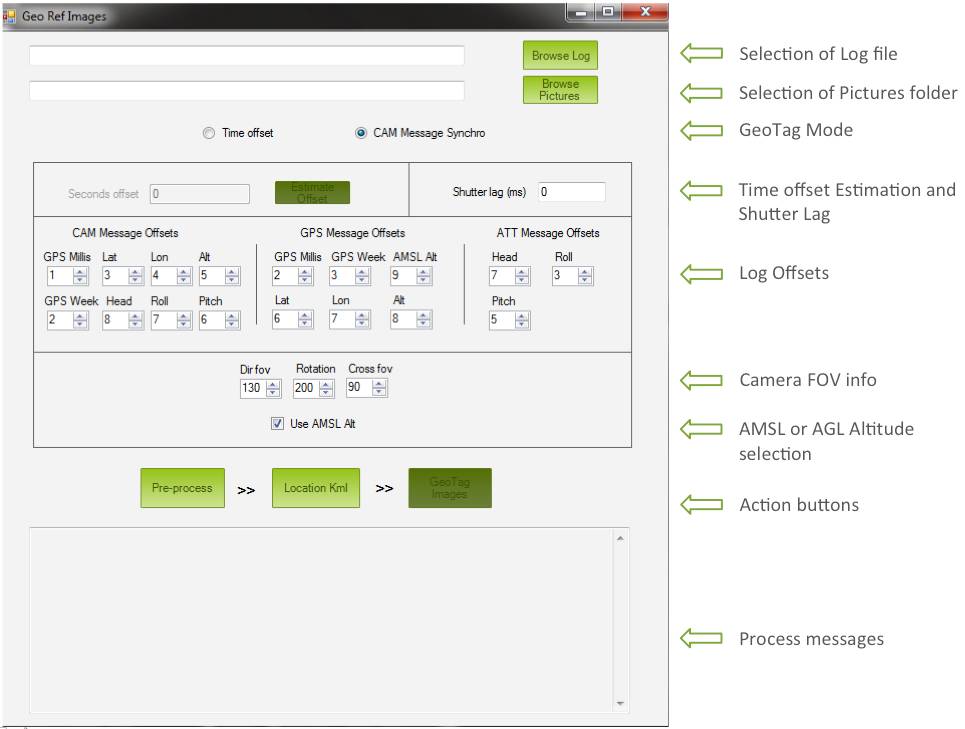
文件选择¶
用户必须在此选择日志位置和摄像机图像文件夹
地理标记模式¶
如上所述,有两个选项。CAM 信息和时间偏移。
时间偏移估算和快门滞后¶
本节仅适用于以下情况 时间偏移 已选择模式。
时间偏移需要通过比较第一张图片时间和日志中的第一个 GPS 时间来估算。一旦用户点击 估算抵消 按钮,该工具将计算时间偏移,并将结果打印在 进程信息 窗口底部的部分:
偏移 估算 = 1st_Picture_Time - 1st_GPS_Time_Logged
备注
如果选择了 CAM 信息,则可使用快门延迟选项。请注意,GPS 位置的默认存储频率为 5Hz(如果使用 3DR GPS),因此每 200 毫秒记录一次。
如果快门延迟小于 100 毫秒,则从当前 CAM 信息中获取 GPS 位置。
如果快门时滞大于 100 毫秒,GPS 定位将从日志中提前 200 毫秒开始。
日志中的项目偏移¶
这部分允许用户告诉工具在日志中哪些地方可以找到特定信息。有三种信息的偏移量需要定义
CAM
全球定位系统
ATT
提示
项目偏移预设为 APM 最新稳定版本的值。
查找日志信息行中项目偏移量的示例
让我们看看日志开头的 GPS 线路格式定义:
FMT, 130, 45, 全球定位系统, BIHBcLLeeEefI, 现状,时间管理系统,周数,NSats,HDop,La6t,Lng,RelAlt,Alt,速度,GCrs,VZ,T
数字的字段 1 是在
单位定义词.
在我们的案例中 单位定义词 是 BIHBcLLeeEefI.因此,字段编号为 1 是 现状
由此我们应该
时间管理系统 = 2
周数 = 3
纬度 = 6
...
视场角和高度基准¶
在这里,用户可以定义视场(FOV)和方向信息。这些信息会被整合到结果文件中,但不会在图片 EXIF 数据中使用或存储。
"这款" AMSL Alt 复选框可选择 AGL 高度(高于地面)或 AMSL 高度(高于平均海平面)。
处理信息¶
这是工具输出信息的位置
其他信息¶
本节包含有关特定相机的其他信息/资料的链接:
使用 Pixhawk 日志文件为 GoPro 图像添加地理标记 (tuffwing.com)
致谢¶
本教程旨在向您展示它是如何工作的。Sandro Benigno 和 Guto Santaella 的原创作品,由 Jesus Alvarez 更新。