蜂拥而至¶
蜂群/编队-飞行界面(测试版)¶

Mission Planner地面站支持有限的 "蜂群",即多架无人机编队飞行。目前,这只是一个实验性的测试版实现,诚然,它既不容易使用,也不是 100% 可靠的。不过,如果您对多无人机协调感兴趣,这是一个很好的开始。
QGroundControl 和 APM Planner 2.0 可提供更复杂的蜂群/多无人飞行器控制,它们都建立在多飞行器架构之上。但 Mission Planner 实现这一功能的方式很有限,它只是同时打开多个串行端口 MAVLink 连接(见上文的四无人飞行器 USB 集线器),并将 GPS 位置信息从其中一个("领导者",以任何模式飞行,从手动到自动)传递给另一个("跟随者",以制导模式飞行)。领航员的 GPS 位置会根据设定的偏移量进行调整,然后作为一系列动态航点发送给跟随者。这样,跟随者将按照设定的 X、Y 和 Z 偏移距离跟随领航员。
在Mission Planner地面站中按下 Control-F 即可进入该界面。这将弹出一个非常拥挤的按钮框(见下图),但关键按钮标在下面:识别 "跟随者 "无人飞行器的串行端口,以及 "蜂群 "按钮,它将弹出第二个窗口,网格显示其他无人飞行器的相对位置偏移。
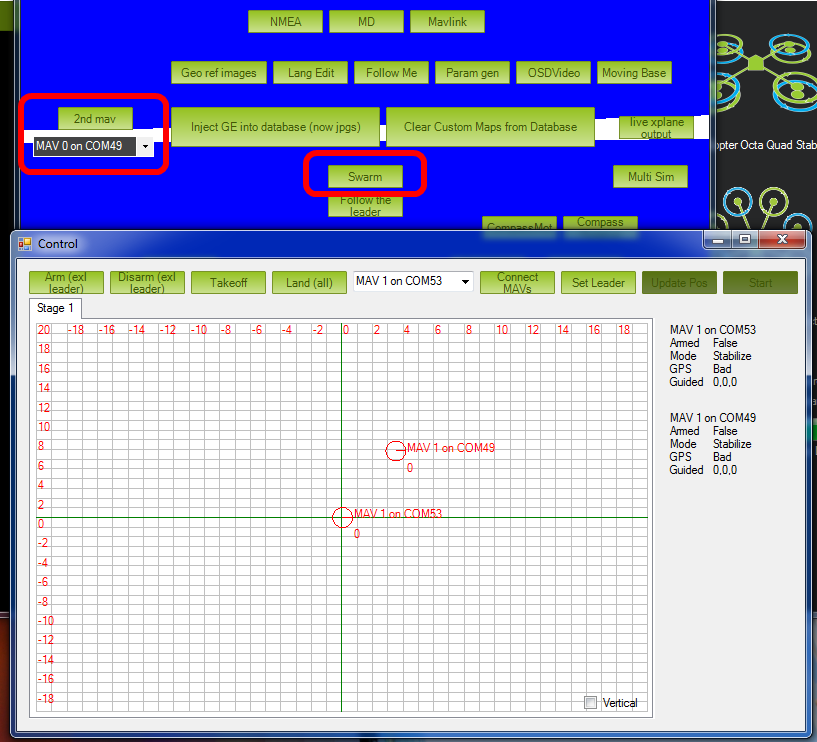
Mission Planner地面站:带有蜂群按钮的屏幕¶
设置步骤:
为每辆车插入一个 3DR 无线电设备
连接Mission Planner地面站中的 "领导者
按 Control-F 键,然后点击 "蜂群"。
点击 "设置领导"。
点击 "连接 MAV"("MAV "代表 "微型飞行器")。为每个 MAV 点击一次。当每个飞行器通过 MAVLink 连接后,它们将出现在网格上
在网格周围拖动 MAV 圆圈,设置所需的偏移量。飞行Mission Planner地面站假定 "上 "为北。
"开始 "将开始向除领队以外的所有载具发送引导模式航点。
现在,正如您可能已经猜到的,获取起始位置可能是最难的。在网格中,它们由 MAV 编号和 COM 端口标识。最好将 MAV 编号粘贴到实际飞行器上,这样就可以将屏幕上的编号和网格位置与地面上飞行器的实际布局相对应。
目前,代码不进行路径预测等。最好先用两架相距 20 米左右的四旋翼飞行器进行测试,然后再逐步提高。
首次飞行
与领航员一起起飞,在 2-10 米高处(位置悬停)。领航员的飞行模式并不重要
点击启动。这将使从属飞行器在制导模式下起飞(发射需要 3-5 秒),并位于与主飞行器相同的高度(假设您没有更改高度偏移)。
手动移动领头羊,第二个四边形(跟随者)应紧随其后。
完成后,手动让领航员着陆。使用 "降落 "按钮也可让跟随者降落。
小贴士
不要关闭蜂群屏幕,否则会停止蜂群。(因为我们使用的是引导模式,如果关闭,四边形飞行器就会停留在最后一个指令位置)。
主地图界面将显示这两个四边形。
如果在网格屏幕上拖动四边形,四边形实际上也会移动。
将 mp. config>planner>position 中的位置流速率从默认的 3 提高到 5,以减少延迟。