使用重复使用的信息进行 FrSky 遥测¶
备注
取而代之的是 直通 FrSky 遥测协议
通过 FrSky 遥测链路传输 ArduPilot 遥测数据的最初解决方案是重复使用 FrSky 用于其他目的和/或 FrSky 为其传感器保留的数据报文。例如,在此协议中,飞行模式使用 tmp1 消息发送,而不是温度。如果您没有在载具上使用 FrSky 温度传感器,这不会造成任何问题。但如果您打算使用温度或其他 FrSky 传感器,该遥测协议就会与它们发生冲突。
连接好设备并配置好 ArduPilot 后,请按照以下说明在遥控发射机上显示标准 FrSky 遥测数据。
协议信息¶
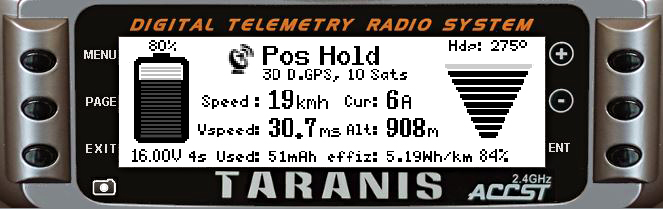
ArduPilot 通过 FrSky 遥测链路发送的数值:
Taranis 遥测屏幕识别器 |
说明 |
|---|---|
燃料 |
剩余电池容量 % |
VFAS |
电池电压 |
Curr |
电流消耗 |
全球定位系统 |
纬度/经度 |
GSpd |
GPS 地速 |
GAlt |
GPS 高度 |
Hdg |
偏航角 |
Alt |
导航高度(相对于原点) |
Tmp1 |
控制/飞行模式 |
Tmp2 |
GPS 状态和卫星数量(num_sats*10 + status) |
如果您在载具上安装了 FrSky 传感器,在发现过程中可能还会出现这些传感器发出的其他信息。
用于 ArduPilot 的重复使用信息脚本¶
下面的脚本是专门为 ArduPilot 制作的,使用遥测协议 4,是重新利用的信息。
更多信息,请参见
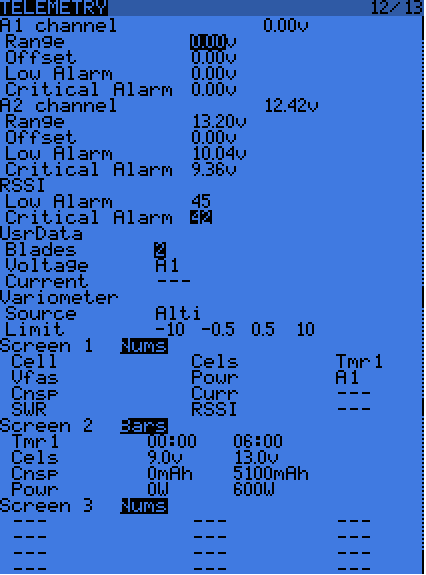
使用 OpenTX 进行配置¶
发射机设置¶
请参阅 OpenTX 手册 了解如何在遥控发射机屏幕上显示 FrSky 遥测馈送的数值。
备注
如果升级到 OpenTX 2.1+,则需要替换 OpenTX 2.0 配置并 "发现 "传感器。还有其他一些小的 "奇怪之处"--例如,T1(飞行模式)和 Tt2(卫星数量)都被称为 TEMP(切换模式可帮助您识别哪个是 TEMP)。
FrSky 遥测数据由 OpenTX 可识别的 16 位或 32 位无符号整数组成。标准 FrSky 遥测数据不包括自动驾驶信息。因此,不太重要的遥测数据信息(温度、变差计......)已被重新组合,以携带飞行模式等更有用的信息。
在 OpenTX 中使用遥测值¶
实例¶
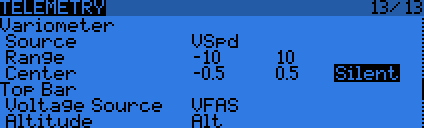
变差计¶
在下面的示例中,OpenTX 的变量计功能被配置为使用已发现的 VSpd 传感器值。该值只有在 -10m/s 和 10m/s 之间时才会被考虑。在 -0.5 至 0.5 m/s 的中心范围内,变差计将保持静默。
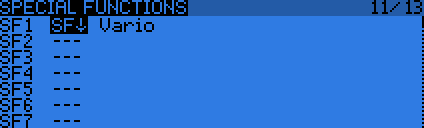
本示例说明如何在 Taranis 上分配开关以启用/禁用变差计声音:
有关如何设置变差计的更详细视频,您可以查看以下内容 视频 ArduPilot 已通过 FrSky 遥测链路提供变差计数值,因此无需使用 FrSky 变差计传感器。
全球定位系统¶
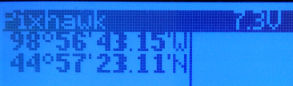
您可以设置显示最新传输的经纬度信息;例如,在发生坠机或飞离的情况下,可以定位您的旋翼飞行器。
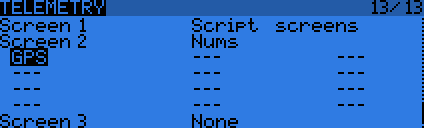
当配置为显示 "GPS "时,自定义遥测屏幕将显示经度/纬度值对:
使用 ErSky9x 进行配置¶
有关如何为 FrSky 遥测配置 ErSky9x 发射机(如 Turnigy 9XR Pro)的信息,请访问 这里.