包容和排斥栅栏¶
概述¶
ArduPilot 支持多达 70 个点的多边形围栏和指定半径的纯圆形围栏。与基于家庭的圆柱形围栏不同 外圆栅栏圆形包容/排除栅栏可以放置在任何位置。可以选择多边形或圆形围栏作为包含型或排除型,也可以混合使用。这些栅栏的目的是通过启动类似 RTL 的故障安全动作,阻止载具飞入(排除)栅栏或飞出(包含)栅栏。 栅栏行动) 或者,如果以旋翼飞行器的 Loiter 模式飞行和 物体回避 如果设置了栅栏,载具通常会在冲破栅栏前停下来,有时还会绕过边界规划路径。
该功能是对更简单的以家庭为基础的 外圆栅栏 并可与之结合。
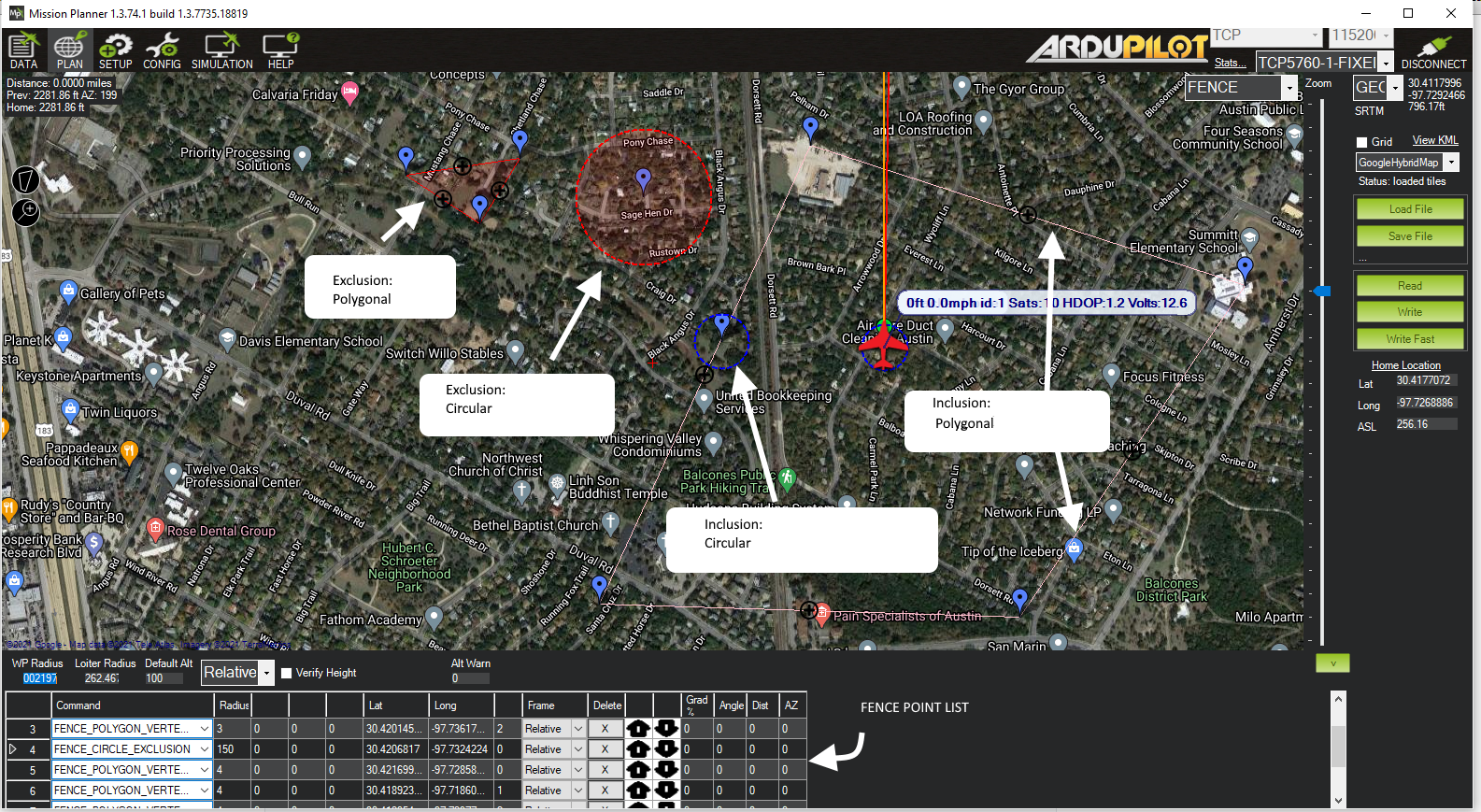
您可以同时启用多个圆形或多边形包含或排除栅栏。下面的Mission Planner地面站 PLAN 屏幕示例展示了每种情况。请注意,它们可以相互重叠。因此,在下面的例子中,飞机可以在大型多边形栅栏和圆形重叠栅栏的结合处飞行,而不会冲出栅栏。下面的例子并不现实,因为有了大型包容栅栏,就永远无法触及外部的排斥栅栏,因此是多余的,但它显示了可以创建的所有不同类型的栅栏。
参见 围栏 为所有围栏通用的围栏设置参数。
这些栅栏的创建和处理方式与任务指令列表和集结点列表类似,并加载到(飞行)控制器中。列表中的每个项目都指定了多边形边界中的一个点或一个圆形项目,无论是包含型还是排除型,如果是圆形,则指定半径。大多数全球控制系统都提供图形绘制工具,用于添加栅栏边界和包含/排除类型的设计。
可在列表中指定不同类型和形状的多个围栏。
警告¶
建议最小围栏半径为 30 米
围栏要求 GPS 运行良好,因此请勿禁用 GPS。 GPS 解除检查 也不 EKF 故障安全 在栅栏启用的情况下。反之,如果您禁用了其中任何一项检查,栅栏也会禁用。
为获得最佳效果,请确保 RTL 正在您的载具上工作。
在 Copter 和 Rover 中启用栅栏后,上膛前检查将要求您在上膛载具前锁定 GPS。
在 Copter 中,如果发生 EKF 故障安全且启用了栅栏,并且在飞行过程中失去 GPS 锁定,则栅栏将被禁用。
在 Copter 中,如果发生 EKF 故障安全,且栅栏已启用并处于自主模式,飞行器将切换到 "陆地 "模式(UGV无人车模式为 "保持"),因为我们不再知道飞行器的位置,而且我们希望确保飞行器永远不会远离栅栏。如果不希望这样,飞行员可以通过将飞行模式开关切换到手动模式来重新获得控制权。
Copter 和UGV无人车后备栅栏是在距离前一个被破坏的栅栏 20 米处创建的,而不是在距离载具位置 20 米处创建的。这意味着如果您选择越过栅栏,您可能只有不到 20 米的时间来重新控制载具,然后栅栏会将载具切换至 栅栏行动 再次。如果您真的想覆盖栅栏,您应该准备好两次切换飞行模式,或者设置启用/禁用栅栏开关。
备注
您可以定义多个包含和排除栅栏。但是,多个包含和排除栅栏,包括 圆柱形围栏 必须重叠,因为载具只能在所有包容围栏的完整重叠区域内运行。排除围栏可设置在包容围栏之内或之外。
备注
要从Mission Planner地面站上传或下载这些围栏,所连接的链路必须使用 MAVLink2 协议。通常情况下,由于使用的是 USB 连接,该协议为默认协议。但是,无线电连接可能默认使用 MAVLink1,因此需要更改为 MAVLink2,以便在其中上传和下载。
与圆柱形栅栏相结合¶
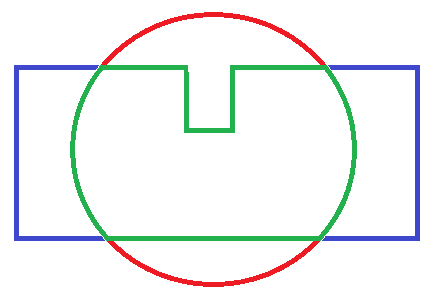
多边形栅栏可以与 圆柱形围栏 而故障安全行为(即停在围栏或 RTL)将在载具最先到达的障碍(即下图中的绿线)处触发
请参阅 圆柱形栅栏 页获取更多警告和说明,包括如何使用 RC 通道辅助开关启用/禁用栅栏。