DroneCAN 电子调速器¶
旋翼飞行器、飞机和漫游车支持 DroneCAN 电子调速器(ESC)可与(飞行)控制器进行双向通信,从而使设置和飞行中监控电子调速器和电机健康状况变得更加容易。
DroneCAN 电调清单¶
连接飞行控制器¶
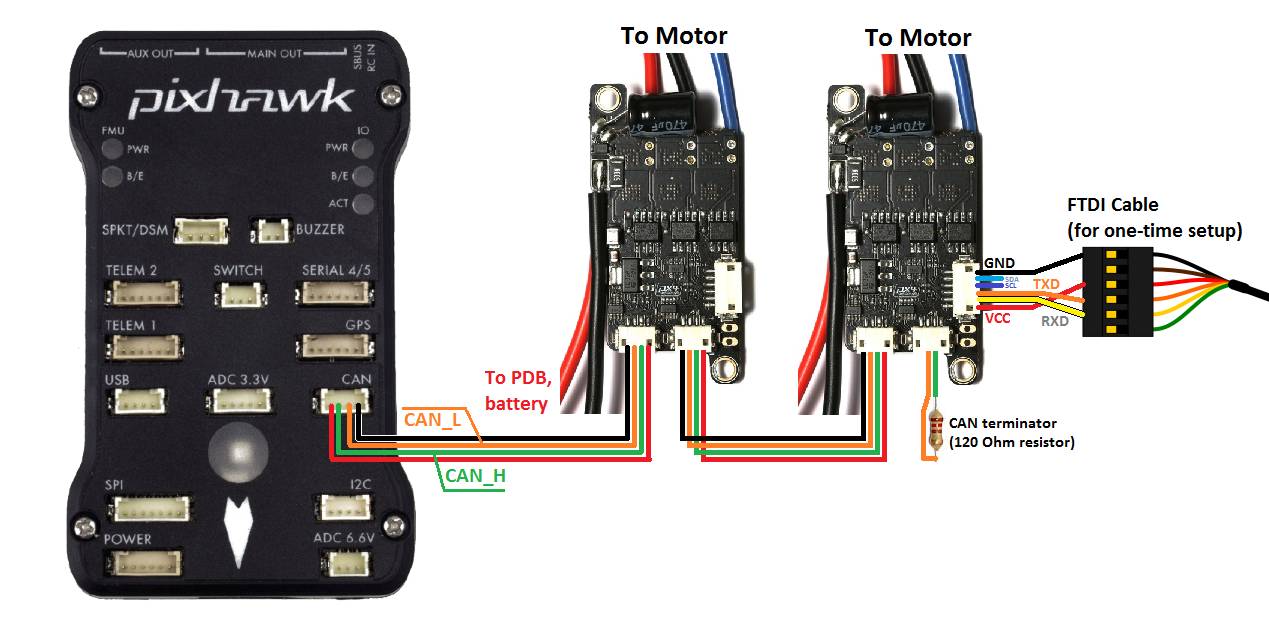
应使用 4 针 DF13 转 4 针 DroneCAN 适配器电缆将一个电调(无论哪个)连接到(飞行)控制器的 CAN 端口。之后的每个电调都应使用 4 针 DroneCAN 电缆连接到前一个电调。最后一个电调的 4 针 DroneCAN 端口应插入 CAN 总线终结器。
只有在电调不通过 DroneCAN 显示其参数的情况下,才需要使用 FTDI 电缆连接到电调的调试端口进行设置。在这种情况下,请联系制造商获取详细说明。
最好能通过 CAN 总线使用 DroneCAN GUI 工具.
(飞行)控制器设置¶
有几个参数可决定向 DroneCAN ESC 发送哪些(飞行)控制器伺服/电机通道:在下面的示例中,显示的是使用 CAN 端口 #1 的 DroneCAN 驱动程序 #1 的值
CAN_P1_DRIVER = 1,将驱动程序 1 分配给端口 1
can_d1_protocol = 1(DroneCAN 协议)
CAN_D1_UC_NODE - 是向电调发送指令的(飞行)控制器的节点 ID,以便区分 CAN 总线上的多个信号源。这通常是在发现过程中自动设置的,但也可根据高级配置(总线上的多个信号源)进行更改。
can_d1_uc_esc_bm - 位掩码,用于确定向 DroneCAN ESCS 发送哪些(飞行)控制器伺服/电机输出信号
can_d1_uc_esc_rm - 位掩码,用于指定哪些自动驾驶舵机/电机输出具有可逆的 DroneCAN ESC,允许发送正负控制值。
记录和报告¶
DroneCAN ESC 将信息反馈给(飞行)控制器,这些信息记录在(飞行)控制器机载日志的 CESC 信息中,并可在任何应用程序中查看。 兼容 ArduPilot 的日志查看器.这些信息包括
错误计数
电压
当前
温度
转速
功率(百分比)
RCOU 信息也会被写入机载日志,日志中记录了发送给 ESC 的所需输出水平,数字范围从 1000(表示停止)到 2000(表示全输出)。