DroneCAN 图形用户界面¶
DroneCAN_GUI 是一种工具,可用于查看、配置和更新连接到 BUS 的节点。
Windows操作系统下载 DroneCAN_GUI 并安装。
Linux: python3 -m pip install dronecan_gui_tool dronecan
在连接(飞行)控制器之前,必须运行 SLCAN 模式。参见 基于 F4 (飞行)控制器的 SLCAN 访问 或 基于 F7/H7 (飞行)控制器的 SLCAN 接入功能 获取设置信息。
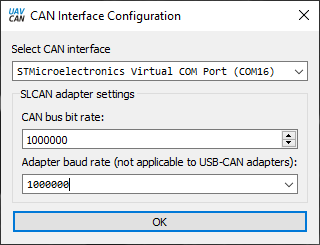
启动 DroneCAN GUI 并为 SLCAN 接口选择正确的 USB 端口。默认 CAN 总线比特率为 1,000,000,无需更改。 CAN_P1_BITRATE 或 CAN_P2_BITRATE (如果使用第二个(飞行)控制器 CAN 端口)已更改。适配器波特率应与(飞行)控制器的 SERIALx 端口波特率一致。默认值 115.2KBaud 应该是正确的。
备注
几乎所有 ArduPilot (飞行)控制器都使用 VCP USB 连接,适配器端口波特率值无关紧要,可以是任何值。
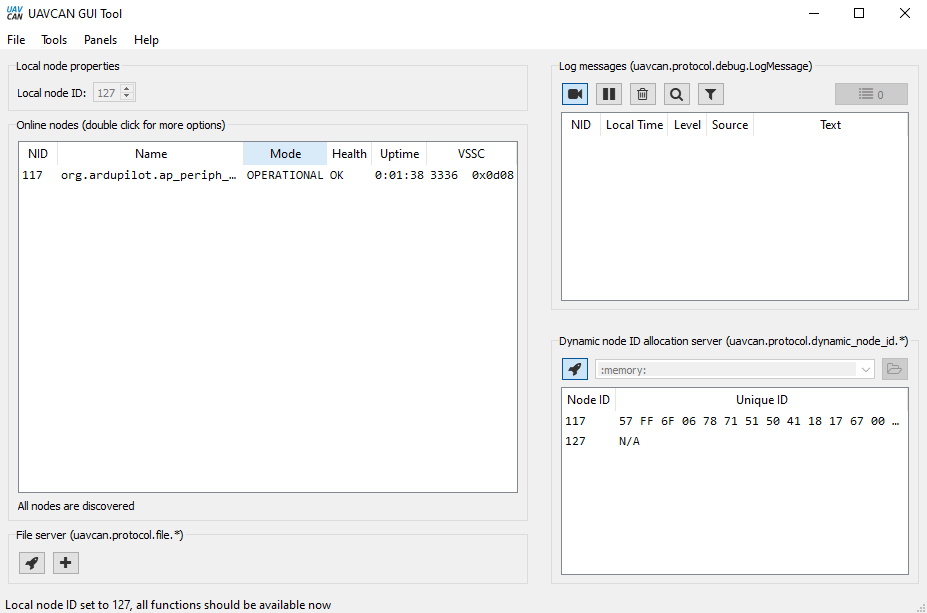
DroneCAN_GUI 工具启动时的界面如下图所示。点击本地节点 ID 旁边的复选框。保持不变,除非 CANBUS 上有另一个具有相同地址的节点。
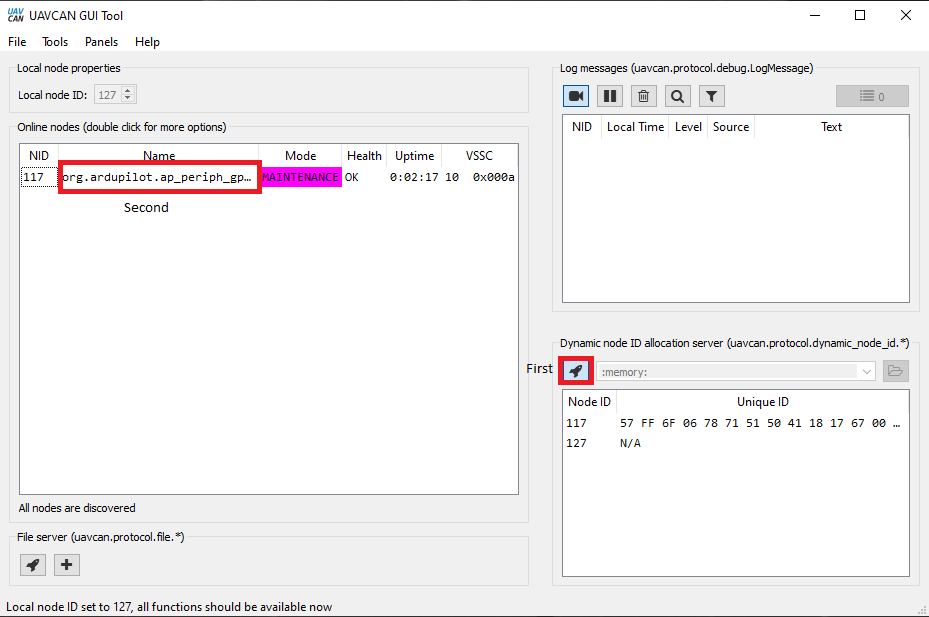
如果节点只安装了引导加载程序,则需要上传固件。 维护 将显示可以找到固件 这里 并下载节点。点击右下角的按钮,然后双击 org.ardupilot.ap_periph 突出显示。
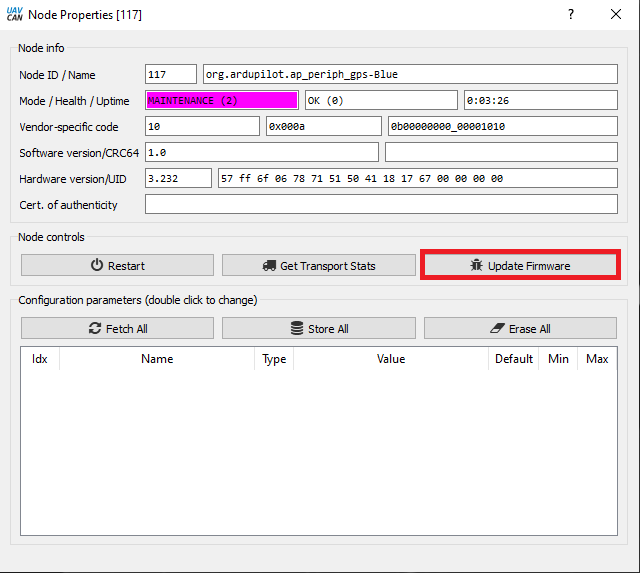
将弹出以下窗口。点击更新固件,为所连接的节点选择正确的文件。
备注
如果在更新固件时遇到困难,可尝试将固件文件名重命名为非常简短的文件名,如 "a.bin"。较长的文件名有时难以加载。
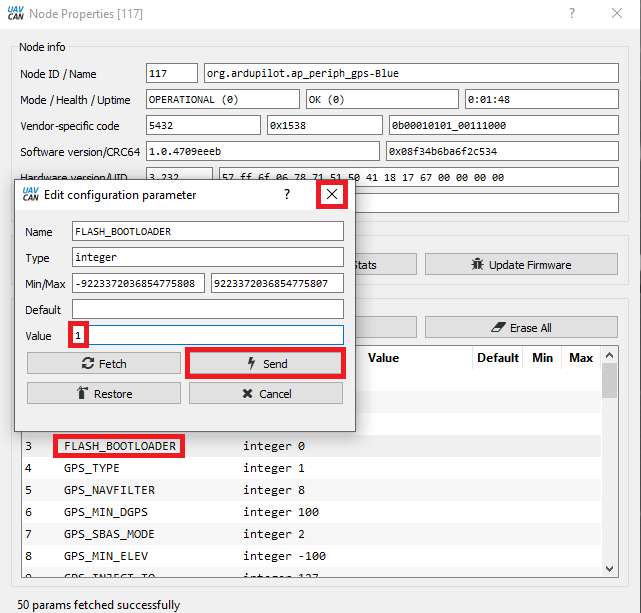
固件上传至节点完成后,主窗口将变为 运行 如下图所示。按下 获取 全部 按钮,然后双击 FLASH_BOOTLOADER 参数并在高亮显示的框中输入 1。按下 发送 并关闭对话框。节点地址可在此窗口中更改,以避免与 CANBUS 上的其他节点以及任何 DroneCAN 设备特定参数相冲突。
调试信息将显示完成。
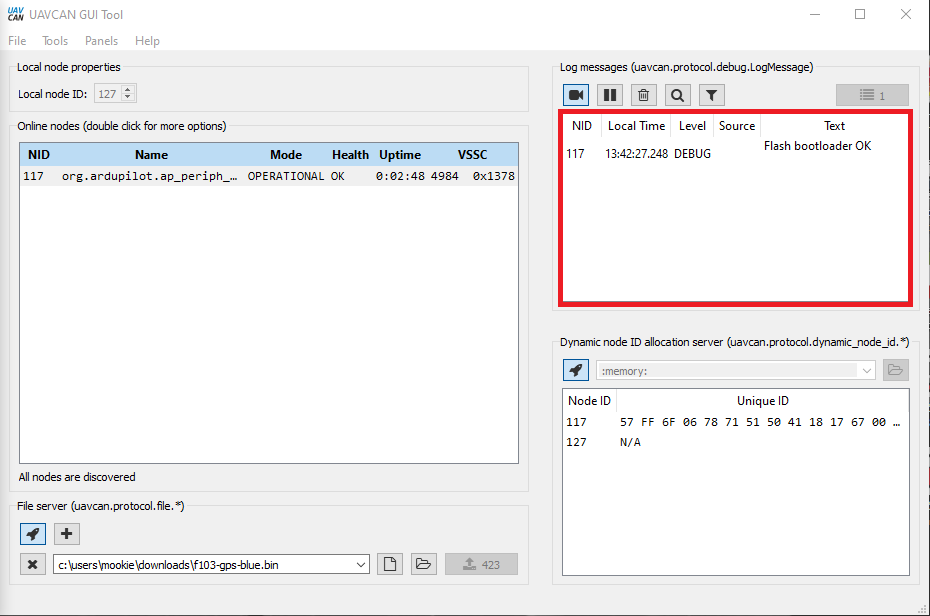
可以使用 "工具 "菜单中的总线监控工具查看通过 CANBUS 发送的信息。

要恢复正常操作,请关闭 DroneCAN_GUI 工具。