自动模式¶
在 "自动 "模式下,旋翼飞行器将遵循(飞行)控制器中存储的预编程任务脚本,该脚本由导航命令(即航点)和 "执行 "命令(即不影响旋翼飞行器位置的命令,包括触发相机快门)组成。本页概述了自动模式。
有关创建任务脚本的信息,请访问 利用航点和事件规划任务 页。支持命令的完整列表可在 任务指令列表 page.
概述¶
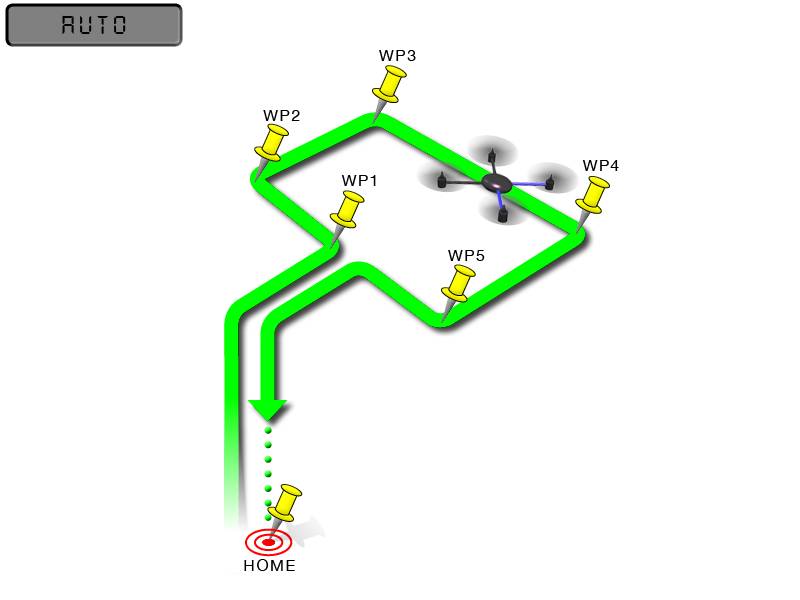
自动模式在每个航点之间以直线导航,并在接近每个航点时沿着平滑的曲线路径(S 形曲线)向下一个航点前进。在接近航点时,它会控制路径,以保持在每个航点的 WPNAV_RADIUS 范围内。速度降低如下 WPNAV_SPEED根据需要,将路径保持在设定的转角横向加速度限制参数 (WPNAV_ACCEL_C).
备注
如果航点后的下一个导航任务项目不是普通航点(如 LAND、LOITER_TURNS 等),则在改变方向前往下一个航点时不会出现这种平滑的曲线路径。在这种情况下,旋翼飞行器会接近航点、停止,然后前往下一个导航航点,而不是在航点前平稳地转弯,然后前往下一个导航航点。此外,小 WPNAV_RADIUS 值将要求曲线非常小,实际上就像上文解释的非 S 曲线行为一样。
自动模式将高度控制从 Alt 保持模式 和位置控制 位置悬停模式 在这些模式飞行良好之前不应尝试。所有相同的要求都适用,包括确保振动水平和罗盘干扰水平可以接受,以及 GPS 运行良好,包括返回低于 2.0 的 HDOP。
控制装置¶
自动 "应设置为以下选项之一 飞行模式 打开飞行模式开关。
在启用自动模式之前,必须先上膛旋翼飞行器。参见 为电机上膛 了解如何上膛旋翼飞行器的详细信息。
备注
"这款" 自动选项 参数可用于改变这种行为,允许在自动模式下进行上膛,和/或允许在进入自动模式后启动任务起飞指令,即使油门尚未升起。
如果在旋翼飞行器着陆时开始执行任务,飞行员应确保节流阀处于关闭状态,然后切换到自动飞行模式,再将节流阀升高。当油门升至零以上时,旋翼飞行器将开始执行任务。
如果从空中开始执行任务,则在飞行模式开关切换到 "自动 "时,任务将从第一条指令开始。如果任务中的第一条指令是起飞指令,但飞行器已经超过起飞指令的高度,则起飞指令将被视为已完成,飞行器将进入下一个航点。
在任何时候,飞行员都可以通过将飞行模式开关返回到另一种飞行模式(如稳定或着陆)来重新夺回(飞行)控制器的控制权。如果飞行员再次切换到 "自动 "模式,飞行任务将从最后一条指令开始恢复。
在执行任务期间,飞行员的滚转、俯仰和油门输入将被忽略,但偏航可以通过偏航杆进行控制。这样飞行员就可以在执行飞行任务时瞄准机头(机头上可能装有硬相机)。当飞行器通过下一个航点时,(飞行)控制器将尝试重新控制偏航。
可以通过Mission Planner地面站的飞行计划屏幕输入、修改飞行任务。请参考 任务指令列表维基页面 查看支持命令的完整列表以及每种命令的简短说明。
结束任务¶
任务的最终指令通常应为 RTL,以确保旋翼飞行器在任务完成后返回。另外,最后指令也可以是一个不同地点的 "降落"(LAND)指令。如果没有最后的 RTL 或 LAND 命令,飞行器将直接停在最后的航点,飞行员需要用发射器重新控制飞行器。
请记住,在使用 RTL 时,旋翼飞行器将返回到 "原点 "位置,即旋翼飞行器上膛的位置。
任务结束后,当旋翼飞行器着陆时,飞行器应自动解除警报,但有时飞行器可能无法感知着陆,飞行员可能需要按住油门,以另一种模式(如 "稳定 "或 "着陆")起飞,然后手动解除飞行器的警报。
飞行稳定调整¶
自动模式将高度控制从 Alt 保持模式 和位置控制 位置悬停模式.
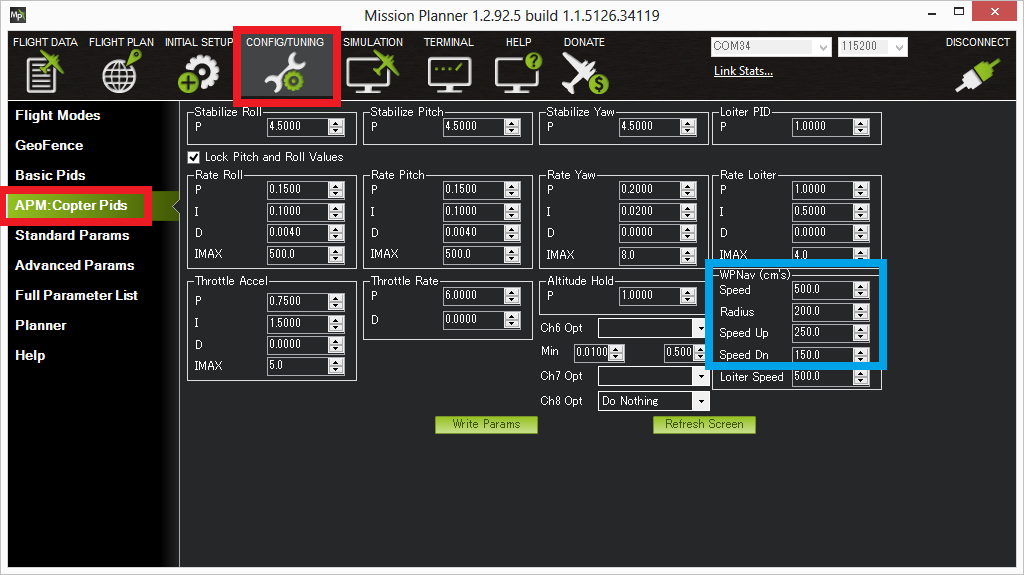
旋翼飞行器的最大水平速度可以用 速度 (WPNAV_SPEED)参数(见上方蓝框)。默认值为 500,表示 5m/s。在无法保持高度和水平速度之前,典型的旋翼飞行器最高速度可达 10m/s ~ 13m/s(即 1000 ~ 1300)。
上下垂直速度同样可以用 加速 (WPNAV_SPEED_UP)和 速度 Dn (WPNAV_SPEED_DN)参数。 WPNAV_ACCEL_Z 决定速度变化的快慢。
其他与速度控制相关的参数也可进行调整,以管理速度变化的快慢: WPNAV_ACCEL和 WPNAV_JERK.
"这款" 半径 (WPNAV_RADIUS 允许您控制在航点被视为 "完成 "和旋翼飞行器进入下一个航点之前,旋翼飞行器必须多接近确切的航点位置。这仅适用于航点命令包含 1 秒或更长时间延迟的情况。如果没有延迟,航点将被视为 "快速航点",一旦追逐的中间目标到达航点,旋翼飞行器就会开始飞往下一个航点(S 曲线行为仅适用于 "快速 "航点)。这个中间目标可以在旋翼飞行器前方 10 米或更远的地方(旋翼飞行器前方的距离随速度参数的增加而增加)。