高度保持模式¶
在高度保持模式下,Copter 可以保持稳定的高度,同时可以正常控制滚转、俯仰和偏航。本页包含有关使用和调整高度保持的重要信息。
概述¶
选择高度保持模式(又称 AltHold)时,油门会自动控制以保持当前高度。左平移/横滚、俯仰和偏航的操作方法与以下模式相同 稳定模式 这意味着飞行员可以直接控制侧倾角、俯仰角和航向。
自动高度保持是许多其他飞行模式的一项功能(如位置悬停, 体育等),因此这里的信息也适用于这些模式。
备注
(飞行)控制器使用气压计测量气压作为确定高度的主要手段("压力高度"),如果飞行区域内的气压因极端天气而发生变化,旋翼飞行器将跟随气压变化而不是实际高度变化。如果安装并启用向下测距仪(如激光雷达或声纳雷达),则会自动提供更加精确的高度维护,直至传感器的极限。
控制装置¶
飞行员可以用油门杆控制飞行器的爬升或下降速度。
如果油门杆处于中间位置(40% ~ 60%),载具将保持当前高度。
在油门中间死区之外(即低于 40% 或高于 60%),飞行器将根据操纵杆的偏转情况下降或爬升。当操纵杆完全向下时,飞行器将以每秒 2.5 米的速度下降,如果在最高点,则将以每秒 2.5 米的速度爬升。这些速度可以通过 PILOT_SPEED_UP 和 PILOT_SPEED_DN 参数。用于确定这些速度的加速度由以下参数设置 PILOT_ACCEL_Z.
死区的大小可以用 THR_DZ 参数。该参数值应介于 "0 "和 "400 "之间,"0 "表示无死区。"100 "将产生一个高于和低于中间油门 10%的死区(即死区从油门杆位置的 40% 扩展到 60%)。
旋翼飞行器允许在高度保持模式下上膛和撤膛。解除警报时,旋翼飞行器可能需要在着陆位置停留几秒钟,以便 "着陆检查器 "验证旋翼飞行器是否已着陆,然后才能解除警报。
飞行稳定调整¶
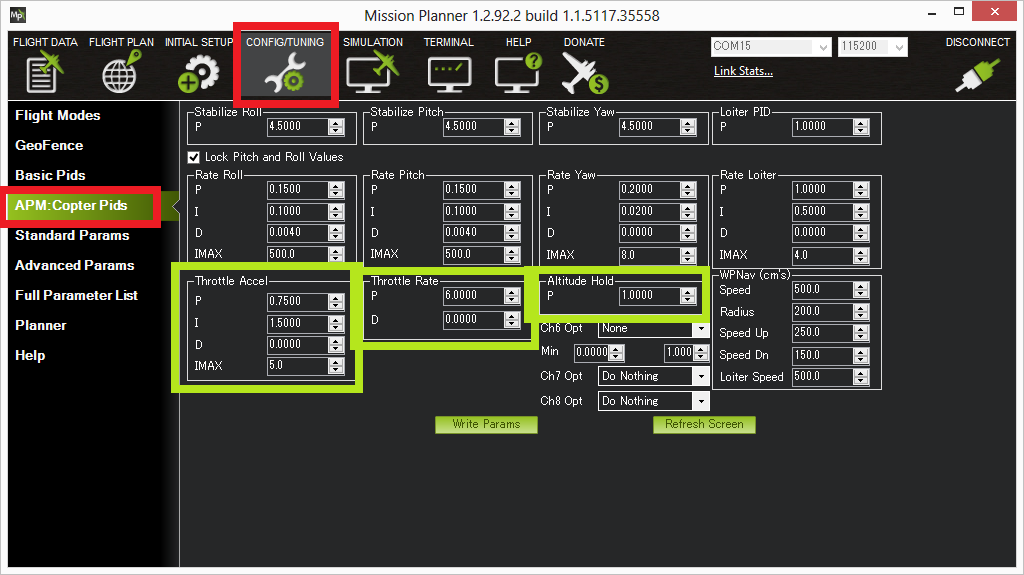
高度保持 P 用于将高度误差(期望高度与实际高度之间的差值)转换为期望的爬升或下降速率。较高的速率会使飞机更积极地尝试保持高度,但如果设置过高,则会导致油门反应生涩。
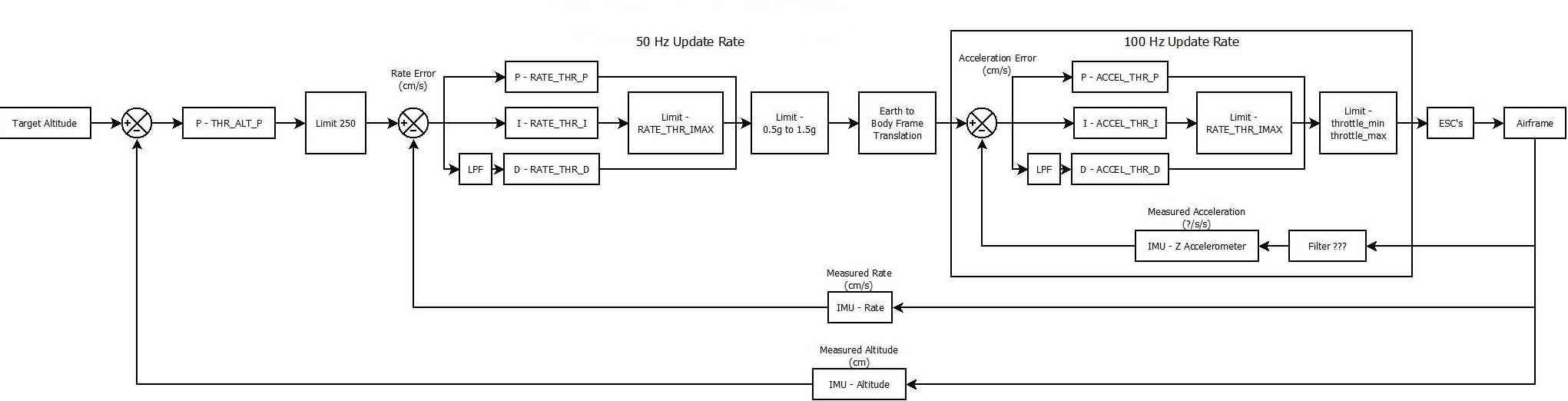
节气门速率(通常无需调整)将所需的爬升或下降速率转换为所需的上升或下降加速度。
油门加速度 PID 增益将加速度误差(即预期加速度与实际加速度之间的差值)转换为电机输出。如果修改这些参数,应保持 P 与 I 的 1:2 比例(即 I 是 P 的两倍)。这些值绝对不能增大,但对于动力非常强劲的旋翼飞行器,将这两个值都减小 50%(即 P 减至 0.5,I 减至 1.0)可能会获得更好的响应。
使用数据闪存日志验证 AltHold 性能¶
查看高度保持性能的最佳方法是 下载数据闪存日志 然后用Mission Planner地面站打开它,并绘制气压计高度、期望高度和基于惯性导航的高度估计值。根据版本和板卡的不同,这些数据的列数也略有不同。
CTUN 的 BAlt(气压高度)、DAlt(期望高度)和 Alt(惯性导航高度估计值)
如下图所示,三者应能很好地跟踪。

常见问题¶
高振动会导致旋翼飞行器在高度保持启动后迅速爬升。检查 测量振动 和 减震 有关如何测量和减少振动的详细信息,请参见维基页面。
飞机缓慢下降或爬升,直到飞行员重新控制飞机稳定下来。通常,这是由于油门杆没有处于中间位置造成的。这种情况通常发生在飞行员从手动飞行模式(如 "稳定")切换到 "AltHold "模式时,旋翼飞行器不会在油门中段悬停。请参见 与设置节气门中间位置相关的维基页面.
在进入 AltHold 时,发动机似乎会停止片刻,但很快就会恢复。这种情况通常发生在飞行员在快速爬升时进入高度保持状态。目标高度是在飞行员切换到高度保持时设定的,但由于飞行器正在快速上升,因此飞越了目标高度。这时,积极的高度保持控制器会做出反应,将电机瞬间降至接近最低,直到飞行器开始回落到目标高度。解决方法是在飞行器处于稳定高度时进入高度保持。
气压变化会导致飞行器在较长时间内上下漂移几米,或导致全球定位系统显示的高度不准确几米,包括偶尔出现的负高度(指低于原点高度的高度)。
在高速向前飞行后,当飞行器平飞时,会出现 1 米至 2 米的瞬间高度损失。这是由于空气动力效应导致在旋翼飞行器顶部(飞行)控制器安装处形成一个瞬间低压气泡,从而导致高度保持控制器认为正在爬升,因此做出下降反应。目前还没有治疗这种行为的方法,尽管可以增加
EK2_ALT_M_NSE参数会降低效果,但会增加上述常见问题 1 的变化。参数EK2_ALT_M_NSE参数范围为 0.1 至 10.0,允许的增量为 0.1。当飞行器接近地面或着陆时,高度保持会变得不稳定。这可能是由于气压计受到螺旋桨冲刷造成的压力变化的影响。解决方法是将(飞行)控制器移出螺旋桨冲刷的影响范围,或将其置于适当通风的外壳内。
光线照射气压计引起的高度突变。
充足的电力¶
飞行器拥有足够的可用动力非常重要。如果没有足够的动力,AltHold 和姿态控制装置需要的动力可能会超过一个或多个电机提供的动力,从而被迫牺牲一些控制,这可能会导致姿态或高度的损失。
理想情况下,载具应能在大约 50% 的油门(中杆)下悬停,高于 70% 的油门会很危险。
警告
如果您在发射机上加入 Expo 功能,就会直接增加 Alt Hold 节流阀死区的大小。