利用 Dijkstra's 避开目标¶
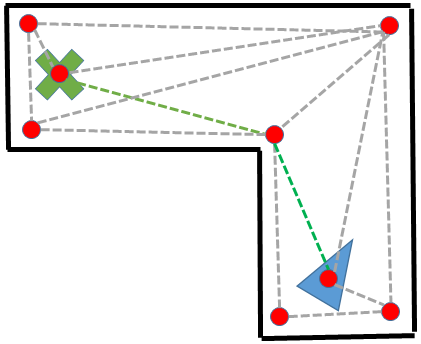
旋翼飞行器和漫游车支持 戴克斯特拉的 用于在自动、向导和 RTL 模式下围绕围栏和隔离区进行路径规划。这种众所周知的算法会在内部建立一个 "安全区域 "列表,该列表由围栏和禁区计算得出,然后找出通往目的地的最短路径。
警告
Dijkstra 不支持避开激光雷达或近距离传感器感应到的物体
警告
Dijkstra's 不支持 Spline Waypoints。
配置¶
OA_TYPE = 2(Dijkstra)。更改后可能需要刷新参数才能看到下面的参数。
OA_MARGIN_MAX:载具应远离围栏和禁区的距离(以米计
OA_OPTIONS 第 2 位(数值 +4)可以设置为在规划路径的栅栏拐角处使用 S 型曲线,以加快转弯速度。需要注意的是,在栅栏尖角处使用 S 型曲线,而不是通常的 "接近、停止、转弯、继续 "的路径规划方法,仍可能导致栅栏破损。 WPNAV_RADIUS 应设置为小于 栅栏.此外,航点也应放置在距离围栏边界至少 10 米的地方。
用于 引导模式,设置 GUID_OPTIONS 第 6 位(例如 64)