移动地图¶
模块 负荷 地图
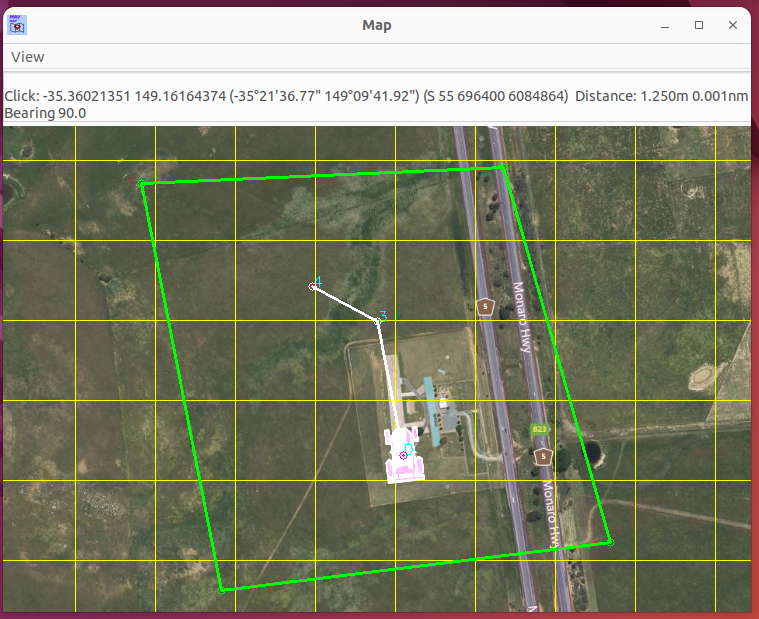
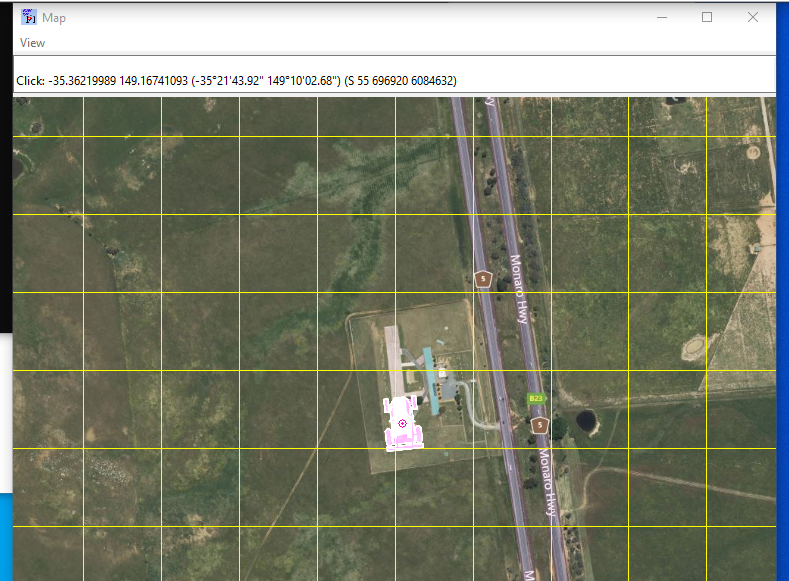
移动地图显示屏,可显示无人飞行器的当前位置、航点和地理围栏。
地图会自动下载并缓存到用户的硬盘上。如果找不到互联网连接,模块将使用这些文件。
要显示航点和地理围栏,可使用 wp 清单 和
篱笆 清单 命令。
右键单击选择航点,然后右键单击将其移动到该点,即可进行航点编辑。
要绘制一组航点,使用 wp 绘制 命令。在地图上右击所需的航点。完成后,使用 wp 环 连接最后一个航点和第一个航点,形成一个循环。
使用 "g "键指定要将地图移动到的位置。
地图有以下设置,可通过以下方式设置 地图 设置.
设置 |
说明 |
默认值 |
|---|---|---|
showgpspos |
根据 GPS 显示位置1 |
0 |
showgps2pos |
根据 GPS 显示位置2 |
1 |
表演者 |
如果在 SITL 中运行,则显示模拟位置 |
0 |
showahrs2pos |
显示 AHRS2 位置解决方案 |
0 |
showahrs3pos |
显示 AHRS2 位置解决方案 |
0 |
亮度 |
设置地图亮度 |
1 |
集结圈 |
在集结点周围显示位置悬停圈 |
假的 |
游荡圈 |
在停机航点周围显示停机圈 |
假的 |
显示方向 |
启用箭头显示任务方向 |
假的 |