初始飞行和飞行后分析¶
进行至少 30 秒的高度保持和悬停飞行。 下载数据闪存日志 不启用谐波带阻滤波。
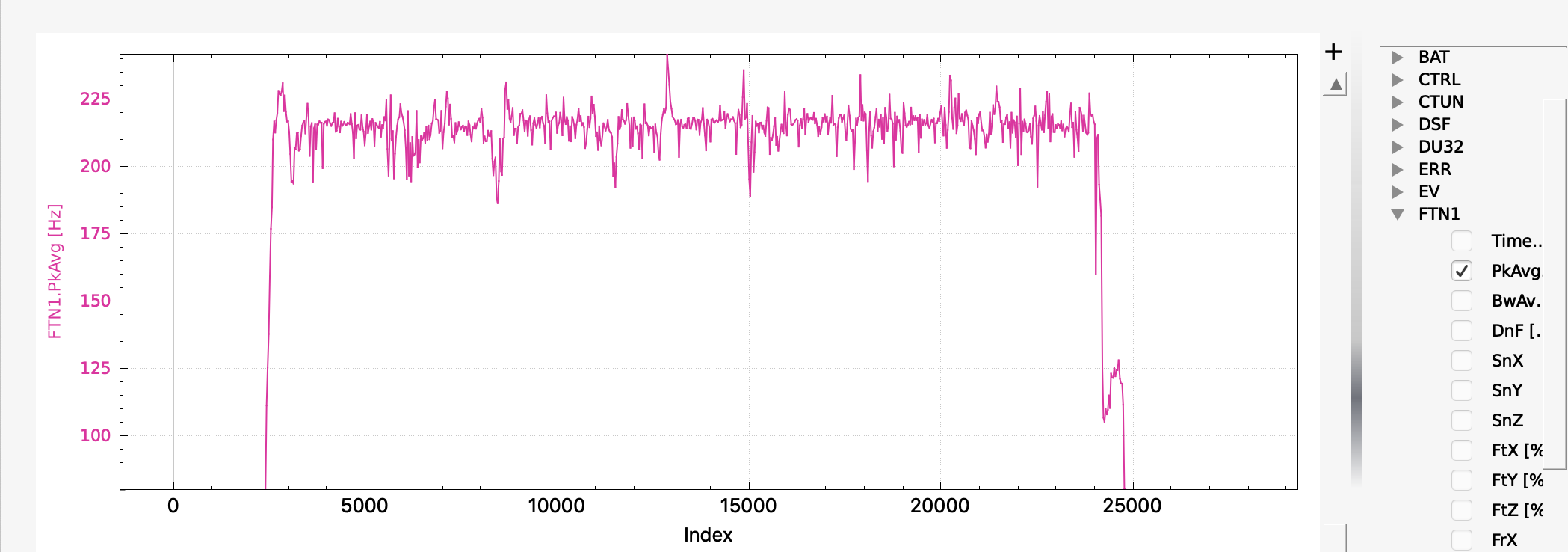
绘制对数元素 FTN1.PkAvg 的图表,该元素表示 FFT 对滚动和俯仰平均噪声频率的能量加权估计值。
在图表上,应该可以看到与马达旋转频率相对应的噪声峰值。在较小的 Copter 上,这个峰值可能在 200Hz 左右,而在较大的 Copter/QuadPlane 上,这个峰值可能在 100Hz 左右。下面是一个在 Pixracer 上运行的 5 英寸四轴飞行器的示例。一旦飞行员加大油门,就会产生相当稳定的噪音,频率约为 220Hz:
如果获得了一致的估计值,您就可以启用谐波带阻滤波,具体操作请参阅 基于飞行 FFT 的谐波带阻滤波设置.
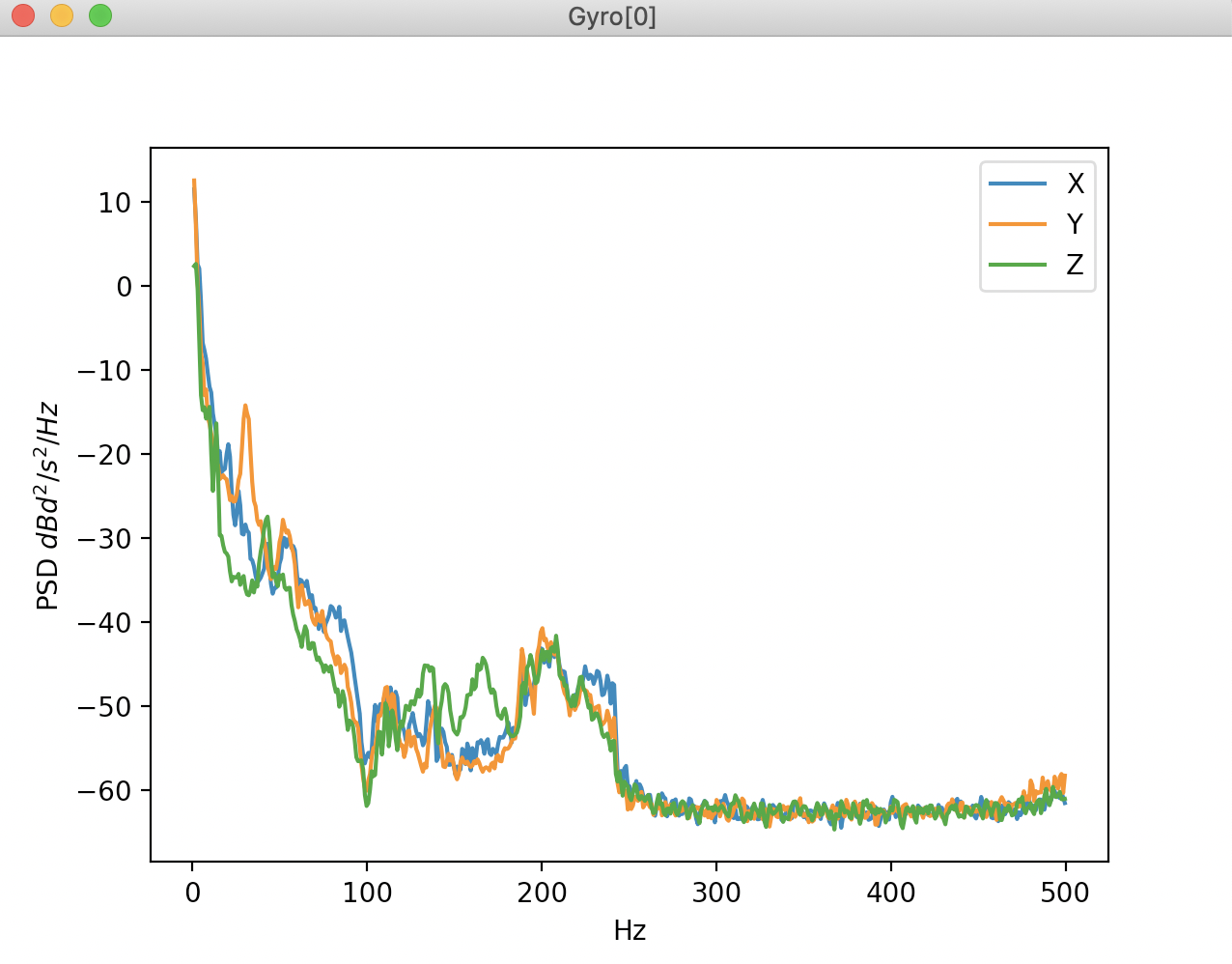
在这次飞行中,启用了动态谐波带阻滤波,并将其设置为跟踪 FFT 确定的频率,对滤波后日志进行的 FFT 分析表明,陀螺噪音已被有效消除: