无线电故障安全¶
Copter 支持多种可配置的故障安全选项,以防飞行员的遥控发射机与(飞行)控制器的接收机之间失去联系。本页将解释此故障保护的设置和测试。请注意,"无线电失效保护 "以前称为 "油门失效保护",因为某些接收器使用油门通道来发出失去联系的信号。
警告
对于单人旋翼飞行器、双人旋翼飞行器和四人旋翼飞行器框架,Copter 3.6 及更早版本中的任何 H_RSC 模式 或 Copter 4.0 中的遥控直通功能 H_RSC_Mode 当发射机信号丢失时,要求遥控接收机通道 8 保持最后的数值。如果接收器没有发送信号或没有保持遥控通道 8 的值,电机将关闭,旋翼飞行器将坠毁。
备注
Copter 还支持其他故障保险,包括 电池, 地面站 和 EKF/DCM 失效框架.参见 故障安全 了解更多详情。
何时触发故障安全保护¶
如果启用并正确设置了无线电故障安全功能,在出现上述任何情况超过 RC_FS_TIMEOUT 秒:
飞行员关闭遥控发射机。
载具超出遥控范围,信号丢失。
飞行员将节流阀通道推至下方 FS_THR_VALUE 从发射器发射。
接收器断电(不太可能)。
连接接收器和(飞行)控制器的电线断裂(可能性不大)。
会发生什么¶
当触发无线电故障安全保护时,可通过参数将旋翼飞行器配置为不做任何操作、立即着陆、RTL 或 SmartRTL。在自动模式任务中,它还可以配置为绕过故障安全保护,或者在已进入着陆阶段时继续着陆。
如果旋翼飞行器解除警报,则不会发生故障保护。
如果旋翼飞行器已上膛但已着陆,则会立即解除上膛。
如果旋翼飞行器在稳定或 Acro 模式下上膛,且油门输入为最小值,则旋翼飞行器将立即解除上膛。
否则,飞行器将执行下文所述参数中配置的操作。
如果故障安全解除(即发射机和接收机重新接触),旋翼飞行器将保持故障安全模式。它将 不 自动返回到触发故障安全保护前的飞行模式。这意味着,举例来说,如果在发生故障安全时飞行器处于 Loiter 模式,而飞行模式被自动更改为 RTL 模式,那么即使在发射器和接收器恢复接触后,飞行器仍将处于 RTL 模式。如果飞行员希望重新在 Loiter 模式下控制飞行器,则需要将飞行模式开关切换到另一个位置,然后再切换回 Loiter 模式。
接收器配置¶
默认情况下,如果与发射机失去联系,大多数新购买的接收机都不会输出脉冲。然而,一些低端接收机在设置时会简单地将所有通道保持在最后的已知位置。这样做并不好,因为(飞行)控制器无法知道驾驶员已经失去了对飞行器的控制。接收器必须设置为向(飞行)控制器发出失去联系的信号,有两种方法可以做到这一点(方法取决于接收器)。每个品牌的发射器/接收器都略有不同,因此请参考发射器的用户手册,以确定可使用的方法以及如何设置。
低节流方式的接收器配置¶
"这款" "低节流阀 "方法 将油门通道(通常为通道 3)拉到低于其正常范围底部的数值(通常低于 1000us)。Futaba 系统和许多旧系统都使用这种方法。下面是 Futaba T7C 发射机与 R617FS 或 TFR4-B 接收机使用 "低油门 "方法的设置方法。
许多接收机可以通过按下接收机上的按钮或直接从发射机上设置故障安全位置。在这种情况下,发射机被临时调整为输出低于正常低怠速位置的油门信号(如果低怠速为 1000us,那么将发送 990uS),将其设置为接收机的故障安全值,然后将低杆调整回正常怠速位置。这个低于节流阀怠速的值被设置为 FS_THR_VALUE如下文所述。
无信号方法的接收器配置¶
"无信号 "方法 - 接收机停止向(飞行)控制器发送信号。这是首选方法,也是大多数现代 FrSky 接收机的操作方法。以下是使用 "无信号 "方法的 FlySky 9 频道发射机与 FrSky D4R-II 接收机的设置方法。
参数配置¶
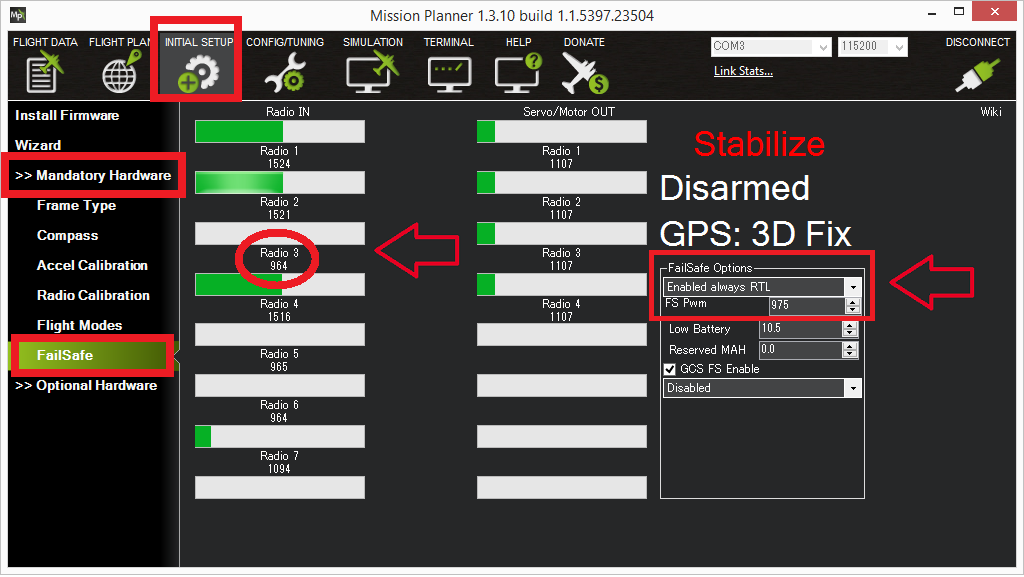
"这款" FS_THR_ENABLE 参数可在Mission Planner地面站完整参数列表或完整参数树中设置,也可使用Mission Planner地面站设置 故障安全选项 初始设置>> 强制硬件>> 故障安全菜单中的下拉菜单。
残疾 (值 0)将完全禁用无线电故障保护功能。
启用 始终 RTL (值 1)将使旋翼飞行器切换至 RTL 模式。如果 GPS 定位不可用,旋翼飞行器将切换到陆地模式。
已启用 在自动模式下继续执行任务 (该值在 4.0 及更高版本中没有影响,但在使用 FS_OPTIONS 参数替换功能,见下文)(值 2)将在自动模式任务中忽略失控保护功能。否则,其行为将与 启用 始终 RTL.该选项在 ArduCopter 4.0 中已不复存在。取而代之的是 FS_OPTIONS 参数。在 Copter 4.0 及更高版本中设置此值将自动转换并设置为(值 1),而在 Copter 5.0 及更高版本中设置此值将自动转换并设置为(值 2)。 FS_OPTIONS 将被修改,以便在 "如果在无线电故障安全自动模式下继续 "的位掩码中包含位 (0)。
启用 始终着陆 (值 3)将把旋翼飞行器切换到陆地模式。
已启用 SmartRTL 或 RTL (值 4)将把遥控飞行器切换到 SmartRTL 模式。如果 SmartRTL 不可用,旋翼飞行器将切换到 RTL 模式。如果 GPS 定位不可用,旋翼飞行器将切换到陆地模式。
启用 SmartRTL 或 Land (值 5)将使飞行器切换至 SmartRTL 模式。如果无法使用 SmartRTL,则会切换到陆地模式。
任何无效值(例如不小心输入了 99 作为参数值)都将与以下行为相同 已启用 始终为 LAND
"这款" FS_THR_VALUE 参数可在Mission Planner地面站完整参数列表或完整参数树中设置,也可使用Mission Planner地面站设置 FS PWM 在初始设置 >>强制硬件 >>故障安全菜单中的值。- 当油门杆完全向下且发射机处于关闭状态时,比通道 3 的 PWM 值至少高 10 PWM。 关闭 - 当油门杆完全向下且发射机处于以下状态时,比通道 3 的 PWM 值低至少 10 个 PWM 关于 - 高于 910 PWM
"这款" FS_OPTIONS 参数(Copter 4.0 及更高版本)是一个位掩码参数,用于选择一个或多个选项,以修改 无线电、GCS 和电池故障保护的标准操作。在Mission Planner地面站的完整参数列表或完整参数树中,方便的复选框弹出窗口可以轻松设置该参数(以及任何其他位掩码)。在连接到互联网时,请务必转到帮助> 检查 Beta 更新,首先获取最新的参数定义。参数 FS_OPTIONS 位数如下
设置第 0 位:如果开启自动模式,则继续 无线电故障安全
位 1 设置:如果开启自动模式,则继续 地面控制站故障安全
位 2 设置:如果处于引导模式,则继续 无线电故障安全
第 3 位已设置:如果降落在任何故障保护器上,则继续
第 4 位设定:继续执行先导控制 地面控制站故障安全
如果没有设置上述任何一项,则执行 FS_THR_ENABLE 选项。
备注
只有掩码位 0、2、& 3 会影响无线电故障保护期间的操作。该参数还与电池和 GCS 故障安全功能配合使用,因此请确保在设置该参数时考虑到所有选项。
下面是Mission Planner地面站初始设置>>强制硬件>>故障安全菜单的截图。
测试¶
您可以在(飞行)控制器通过 USB 电缆或遥测链路连接到Mission Planner地面站的情况下进行以下测试,以检查故障保护装置。您可以在不插入锂电池的情况下完成这些测试,但如果要连接电池,则应首先卸下螺旋桨。
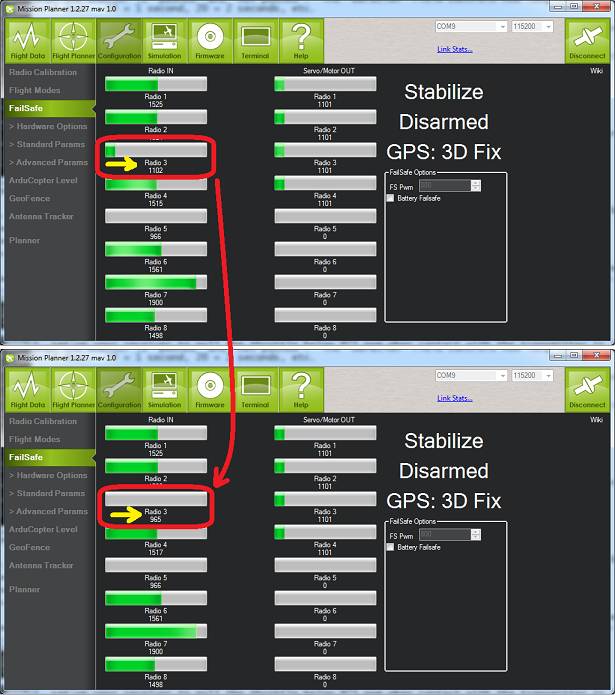
测试 #1:如果使用 "低节流阀 "方法,确保在失去无线电联系时节流阀通道下降
确保遥控发射机处于打开和连接状态,油门全关,飞行模式设置为 "稳定"。
节流阀/电门(通道 3)的 PWM 值应大致如下图所示。其值可高可低,但一定要比 FS PWM 字段中的值至少高 10%。
关闭发射机,节流 PWM 值应比 FS PWM 值低至少 10(如下面第二幅图)。
测试 #2:确保在稳定或 ACRO 状态下节流阀处于零位时电机解除防盗状态
切换到稳定模式,启动发动机,但油门保持为零。关闭发射机。发动机应立即解除(红色 LED 灯将开始闪烁,Mission Planner地面站的飞行数据屏幕上将显示 DISARMED)。
测试 #3:确保油门超过零时飞行模式变为 RTL 或 LAND
切换到稳定模式,启动发动机,将油门升至中点。关闭发射机。如果有 GPS 锁定,飞行模式应切换为 RTL;如果没有 GPS 锁定,则应切换为 LAND(飞行模式和 GPS 锁定状态在Mission Planner地面站的飞行数据屏幕上可见)。
测试 #4:故障安全解除后重新夺回控制权
继续第 3 项测试,重新打开发射机
当飞行模式仍处于 RTL 或 LAND 并已上膛时,将飞行模式开关切换到其他位置,然后再切换回稳定模式。确保 "故障安全 "页面上显示的飞行模式正在适当更新。
测试 #5(可选):切断接收机电源
切换到稳定模式,启动发动机,并将油门保持在零以上。
小心断开连接接收器和(飞行)控制器的电源线
飞行模式应切换为 RTL 或 LAND,如测试 #3 所述
警告
在重新连接接收机电源之前,拔下(飞行)控制器的电源插头,使其处于断电状态。
使用接收器设置飞行模式 (切勿使用!)¶
接收机和(飞行)控制器的设置方法如上所述(即 "低油门 "和 "无信号 "方法),而不是将接收机设置为将通道 5(飞行模式通道)设置为 "低油门 "和 "无信号"。 飞行模式 已设置为 RTL 的插槽。例如,可将接收机设置为将 ch5 的 pwm 值调至 1700us,即 "飞行模式 5",然后在Mission Planner地面站的初始设置 >>强制硬件 >>飞行模式屏幕上将其设置为 RTL。
虽然这看起来可行,但我们强烈不建议使用,因为这可能会导致坠机。由于(飞行)控制器无法知道发生了遥控故障安全,因此可能会出现不希望发生的行为,例如通过模式更改来覆盖其他故障安全(如低电量或 GCS 故障安全)。