电池故障安全¶
电池故障安全保护可配置为自动将载具切换到 RTL, SmartRTL 或 土地 如果载具电池电压在 10 秒钟内低于指定电压,或者估计剩余电量低于可配置的阈值,就会进入该模式。
备注
这种故障保护装置要求载具有一个正常工作的 电源模块.
备注
ArduPilot 固件 4.0 及更高版本支持多达 9 块电池/电源监视器。下面的讨论也适用于这些可选电池。每个电池都可以触发故障安全保护,每个电池都可以有不同的操作和设置值。此外,一组电池可被视为一个单元,请参阅 BATTx_MONITOR = 10.
何时触发故障安全保护¶
如果启用并正确设置了电池故障保护功能,当主电池电量达到最大值时,电池故障保护功能就会触发。
电压下降到 BATT_LOW_VOLT 参数(或旧版本中的 FS_BATT_VOLTAGE)超过 10 秒。默认电压为 10.5 伏。如果设置为零,基于电压的触发将被禁用。
剩余容量低于 BATT_LOW_MAH 参数(或旧版本中的 FS_BATT_MAH),电池满容量的 20% 是一个不错的选择(例如,"1000 "表示 5000mAh 电池)。如果设置为零,基于容量的触发将被禁用(即仅使用电压触发)
会发生什么¶
当触发故障安全保护时:
蜂鸣器会发出低电量警报声
LED 灯将闪烁黄色
地面站 HUD 上将显示 "低电量!"(如果已连接遥测功能)。
那么就会出现以下情况之一:
无 如果载具已经解除警报或正在执行 RTL 或 Land
解除电机 如果飞行器处于 "稳定 "或 "俯冲 "模式,且油门为零或飞行器已着陆
中保存的用户可配置的操作 batt_fs_low_act 规范
与所有故障保护一样,用户可以通过将飞行模式开关切换到其他模式来重新控制飞行器。除非设置了双层故障安全保护,否则电池故障安全保护不会再次触发(见下文)
"这款" FS_OPTIONS 参数(Copter 4.0 及更高版本)是一个位掩码参数,用于选择一个或多个选项,以修改无线电、GCS 和电池故障保护的标准操作。在Mission Planner地面站的完整参数列表或完整参数树中,方便的复选框弹出窗口是设置该参数(以及任何其他位掩码)的简便方法。在连接到互联网时,请务必转到帮助> 检查 Beta 更新,首先获取最新的参数定义。参数 FS_OPTIONS 位数如下
设置第 0 位:如果开启自动模式,则继续 无线电故障安全
位 1 设置:如果开启自动模式,则继续 地面控制站故障安全
位 2 设置:如果处于引导模式,则继续 无线电故障安全
第 3 位已设置:如果降落在任何故障保护器上,则继续
第 4 位设定:继续执行先导控制 地面控制站故障安全
如果没有设置上述任何一项,则执行 batt_fs_low_act 或 batt_fs_crt_act 配置的选项。
备注
只有位掩码第 3 位会影响电池故障安全时的操作。该参数还与 GCS 和无线电故障安全功能配合使用,因此请确保在设置该参数时考虑到所有选项。
备注
即使故障安全操作设置为 "无"(即 batt_fs_low_act = 0),蜂鸣器将发出蜂鸣声,LED 指示灯将闪烁黄光。要完全禁用电池故障安全保护,请设置 BATT_LOW_VOLT 和 BATT_LOW_MAH 为零。
备注
一旦触发电池故障安全保护,在重启(飞行)控制器之前无法重置。
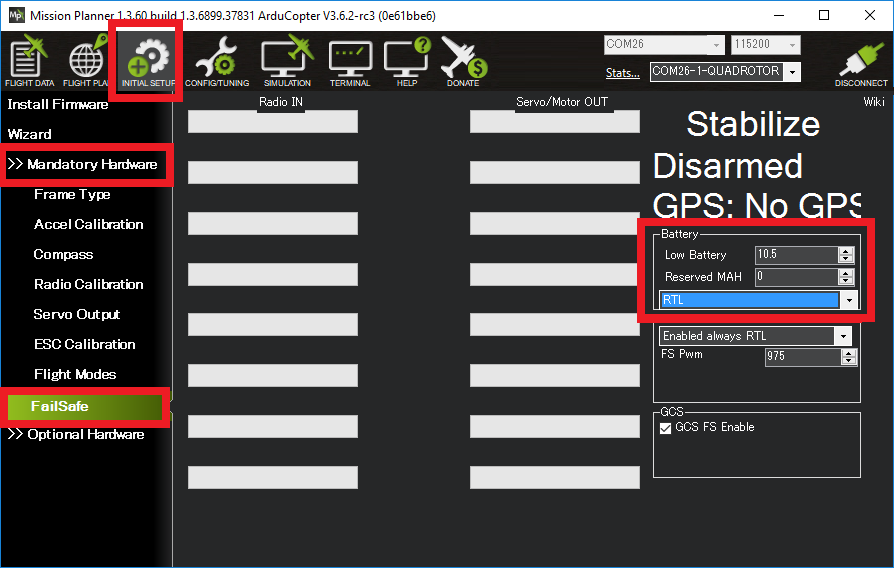
使用Mission Planner地面站进行设置¶
在 初始设置 | 强制硬件 | 故障安全 page:
如果电池部分参数显示为灰色,请按照说明设置。 电源模块
设置 "低电量 "阈值电压(即 10.5 伏)
设置 "Reserved MAH"(保留 MAH),或者如果根据估计消耗的电流从不触发故障安全保护,则保留为 "0"。
从下拉列表中选择所需的行为(Land、RTL、SmartRTL 等
双层故障安全保护¶
ArduPilot 包括双层电池故障安全保护。这样,如果电池电压或剩余容量低于更低的阈值,就可以设置后续操作。
BATT_CRT_VOLT - 保持次级(较低)电压阈值。设置为零则禁用。
BATT_CRT_MAH - 保持次要(较低)容量阈值。设置为零则禁用。
batt_fs_crt_act - 表示要采取的次要行动。合理的设置是 batt_fs_low_act = 2(RTL)和 batt_fs_crt_act = 1 (陆地)
高级设置¶
batt_fs_voltsrc 允许配置使用原始电池电压还是骤降校正电压
BATT_LOW_TIMER 可以配置电压必须低于阈值多长时间才会触发故障安全机制
BATTx_可以设置参数来触发其他电池上的故障安全保护装置