RPLidar C1、A2 和 S1 360 度激光雷达¶
"这款" RPLidar C1, RPLidar A2或 RPlidar S1 可用于 ArduPilot 中的物体回避。本页面介绍了如何将它们直接连接到(飞行)控制器。有关如何设置避障功能的更多详情,请参阅 Copter 和 Rover 的避障维基页面。



图片来源:robotshop.com
购买地点¶
Slamtec.com 包括一个 此处的经销商列表
规格¶
A2:
转速10 赫兹/600 转/分
采样率:4000 至 8000 采样率/秒
范围: 6 米至 18 米6 米至 18 米
分辨率0.9 度
电压/电流要求:5V / 1.5A
S1:
旋转速度8-15 赫兹
采样率92000 采样率/秒
范围: 10 米至 40 米10 米至 40 米
分辨率0.39 度
电压/电流要求:5V / 0.5A
连接和配置¶
- A2:
- S1:
激光雷达应水平安装在载具顶部或底部,黑色电缆指向载具尾部。确保传感器的视线不被载具的任何部分遮挡,包括 GPS 杆、载具支腿等。
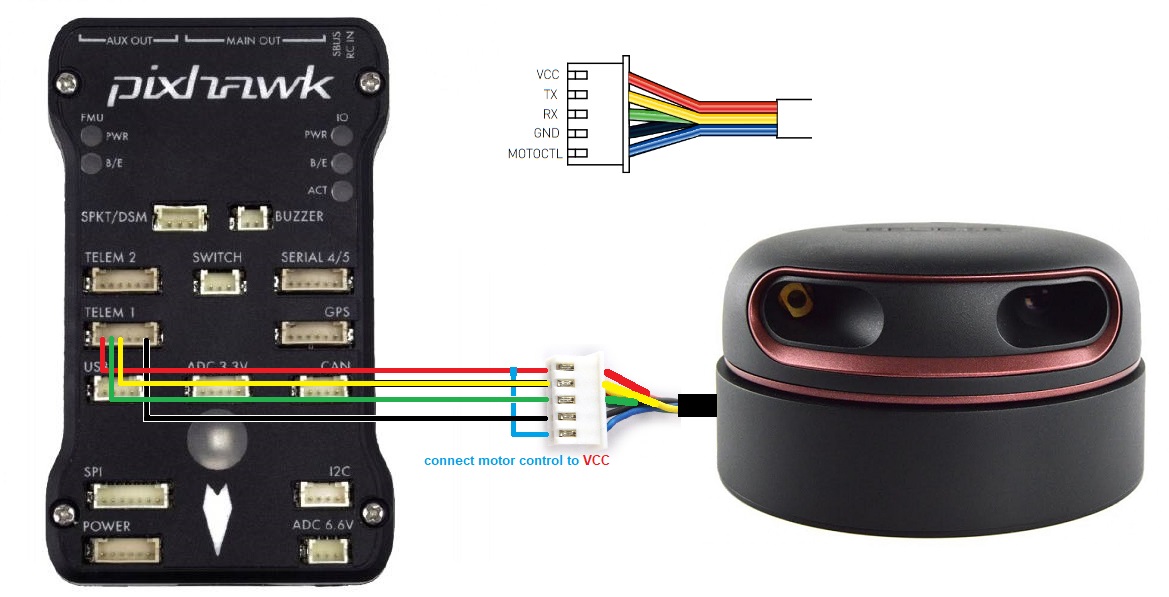
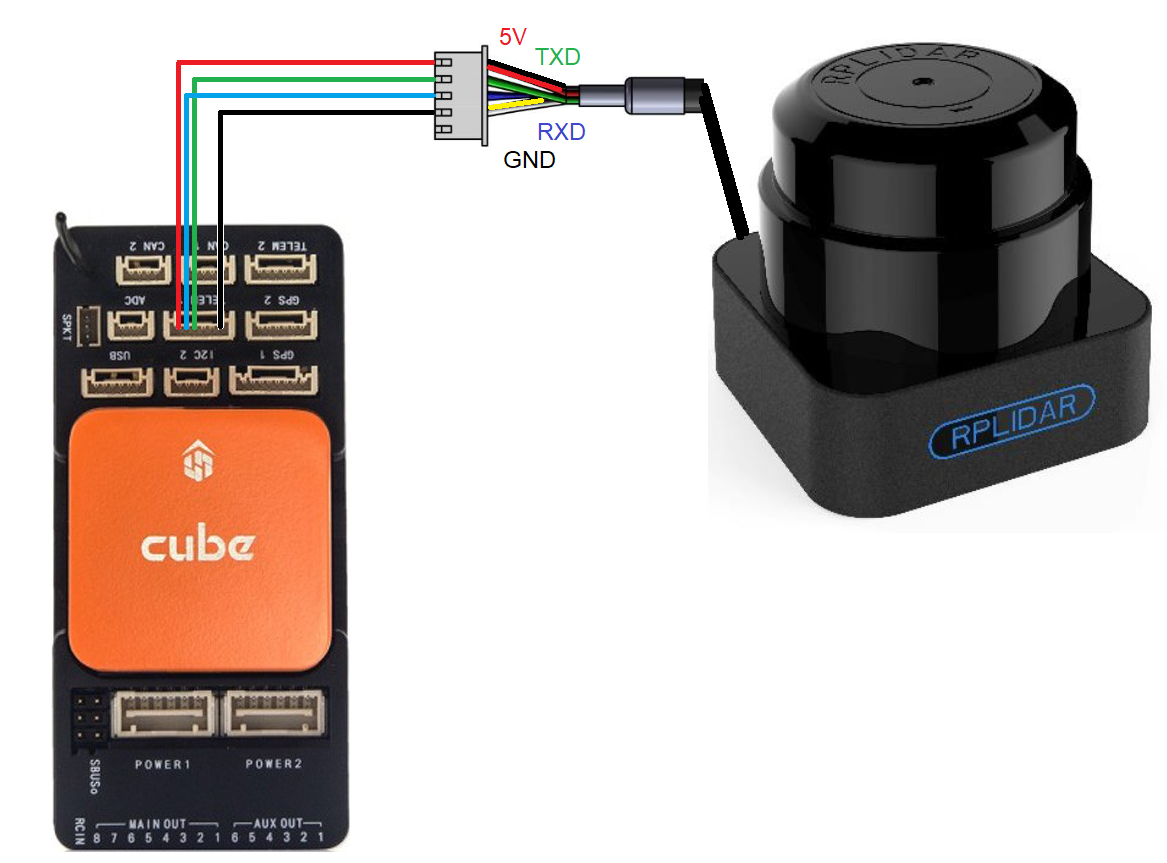
如上图所示,激光雷达可连接到(飞行)控制器的串行输入端。请确保(飞行)控制器的 5V 电源能够提供设备所需的电流。否则,应为设备提供独立的 5V 电源。
下面是第一个接近传感器的设置示例:
serial1_protocol ="11"("Lidar360"),如果使用串行接口 1
SERIAL1_BAUD = 如果使用串行 1,C1/A2 为 "115",S1 为 "256
PRX1_TYPE = "5"
PRX1_ORIENT 如果安装在载具顶部,则 = "0";如果倒置安装在载具底部,则 = "1"。
如果使用 Telem1(又称串行 1)或 Telem2(又称串行 2),可能需要关闭流量控制。
brd_ser1_rtscts 如果使用串行 1,则 = "0
有关在 Copter 上使用该传感器避开物体的更多详情,请查阅 这里.