之字形模式¶
之字形 "模式是一种半自动模式,旨在方便驾驶员驾驶飞行器在田间来回飞行,这对作物喷洒非常有用。
备注
ZigZag 可在 Copter-4.0 及更高版本中使用
它的工作原理是
两个或最好是三个位置 辅助开关 设置为 "之字形 SaveWP"(即 RC7_OPTION = 61)
飞行员在 位置悬停 模式,起飞后再切换到之字形模式(将来我们可能会实现在之字形模式下上膛和起飞)
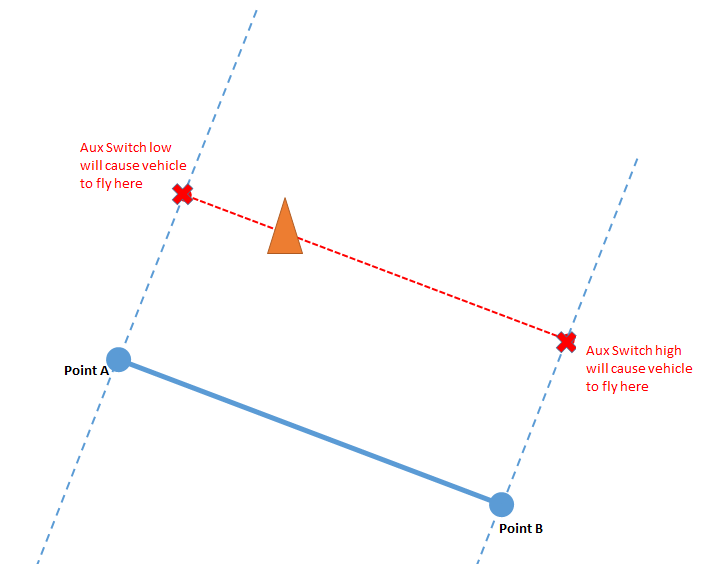
该飞行器是手动飞行的(飞行起来就像 位置悬停)到田野的一侧,然后将辅助开关移到最高或最低位置(哪个位置并不重要),以记录该侧的情况
飞行器飞到场地的另一侧,开关移到相反位置
现在可以使用开关启动飞行器(以当前高度)自主飞向场地的任意一侧。飞行器到达另一侧后将恢复手动控制。飞行员也可以通过将辅助开关移至中间位置或更改飞行模式来重新获得手动控制。
如果向下 测距仪 时,飞行器将跟随地形飞行。如果在从一侧穿越到另一侧时测距仪显示不健康,飞行器将恢复手动控制并停止。
手动飞行时,ZigZag 使用 位置悬停模式的 参数。例如,最高速度可通过以下方式配置 LOIT_SPEED.
从场地的一侧自主飞向另一侧时 自动模式 参数。例如,最高速度可以用以下参数配置 WPNAV_SPEED..
自动运行¶
备注
此功能将在 Copter-4.1.0 中提供
备注
必须使用 zigz_auto_enable = 1,并重新加载参数后,任何参数才会可见,功能才会启用。
注册字段边点后,如果您的 RC 切换器配置了 RCx_OPTION = 83(之字形自动模式),您可以按照可编程的距离间隔从一边到另一边自动覆盖田地,如果配备了喷雾器,还可以启用喷雾器。
使用方法
飞到场地一侧,如上所述注册 ZigZagWP A,然后飞到 ZigZagWP B 并设置。
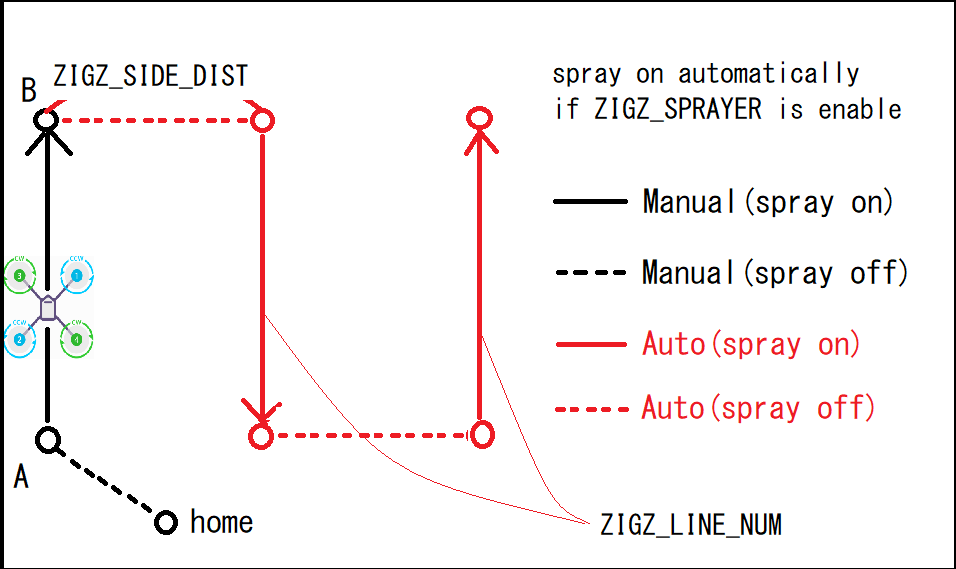
然后切换已设置的 "之 "字形自动模式开关。载具将如图所示行驶,并自动启用喷洒器(如果已设置)。请参见 农作物喷雾器 以获取说明。
启动后,载具将向以下方向移动 ZIGZ_DIRECTION 就其标题而言 ZIGZ_SIDE_DIST然后继续穿越原野,直到到达对面的 ZigZagWP。然后它将等待 ZIGZ_WP_DELAY 让喷涂机完全停止,然后移动 ZIGZ_SIDE_DIST 再从田边走下来,回到整个区域。这样做的目的是 ZIGZ_LINE_NUM 次(-1 = 无限次,直到切换出该模式;=0 只会移动到第一个场交叉位置,但不会继续前进)。
将 "之 "字形自动切换开关移至低位可立即停止该模式,并返回正常的 "之 "字形模式。