UGV无人车 SITL/MAVProxy 教程¶
本教程简要介绍了如何使用 SITL 和 MAVProxy 对于 无人车UGV 测试。
概述¶
UGV无人车是一个易于上手的平台。与 Copter 或 Plane 不同的是,UGV无人车没有快速移动的螺旋桨,因此不需要上膛电机。由于是沿地面移动,因此无需考虑起飞或着陆,暂停/浮空/等待也只是 "停止 "而已。初始化结束后,UGV无人车就可以出发了!
这篇文章主要面向希望使用 SITL 和 MAVProxy.它展示了如何使用不同模式、运行任务、设置地理围栏以及执行其他一些基本测试任务。
该教程是对主题的补充 使用 SITL 进行 ArduPilot 测试.
备注
我们使用 MAVProxy 但您可以 将另一个地面站连接到 SITL 如果您愿意,也可以使用类似的说明(任何 GCS 都可以使用)。
先决条件¶
本教程假定您已经设置了 Windows操作系统上的 SITL 或
Linux操作系统 并使用 --地图 和 --控制台 选项:
CD ~/ardupilot/无人车UGV
模拟载具.py --地图 --游戏机
安排 MAVProxy 命令提示符, 控制台 和 地图 这样您就可以在观察状态的同时发送命令。
开始¶
将漫游车切换到制导模式,然后在 mavproxy 控制台输入以下内容进行上膛
指导
上膛 throttle
右键单击 在目标目的地的地图上,选择 飞往并输入高度(将被忽略)。UGV无人车应行驶到该位置,然后暂停(仍处于引导模式)。
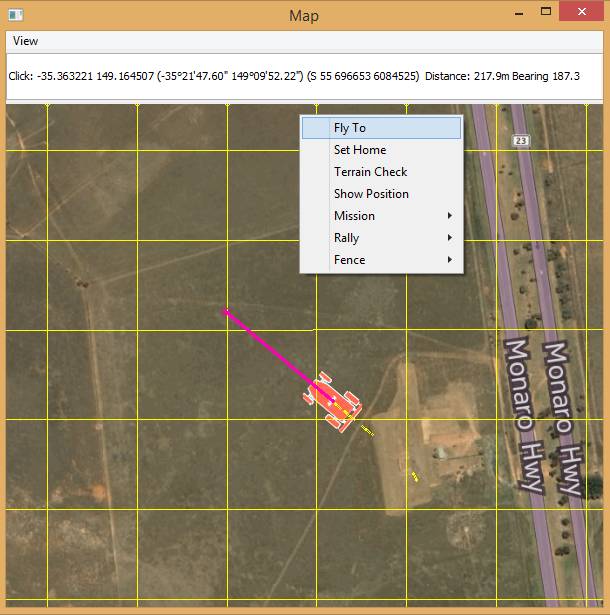
MAVProxy:UGV无人车去定位¶
如果任务已加载,也可以直接切换到自动模式运行:
模式 载具
提示
任何与漫游车无关的命令或参数都将被忽略(如 TAKEOFF 命令和任何高度信息)。
引导载具¶
上一节介绍了在地图上移动载具所需的几乎所有知识。 指导 模式。
您也可以使用以下两种格式在命令行中手动输入目标位置。如果只指定了高度,则将使用上次指定的 LAT/LON 格式。
导游 纬度
导游 LAT 伦敦 纬度
如果需要暂停然后重新启动制导路径,只需指定高度(如 0)即可。下面的命令将模式设置为 "保持",然后重新启动飞行器朝前一点飞行:
指导>; 模式 持有
保持>; 导游 0
指导>;
完成后,您可以切换到 RTL 模式(在 自动 模式):
指导>; 模式 rtl
RLT>;
执行任务¶
您可以随时使用 wp 负荷 命令。起飞后,当前任务将在您切换到
自动 模式。
下面的示例显示了如何加载并启动其中一个测试任务,跳转到第二个航点,然后 环 任务:
wp 负荷 ..\工具\自动测试\通用任务\CMAC-线路.文本
模式 载具
wp 设置 2
wp 环
备注
UGV无人车只能运行 支持的命令 (其他忽略不计)。
"这款" MAVProxy 航点文档 列出了全部可用命令(也可以在命令行输入 "wp",使用自动完成功能获取)。
如果您想创建一个航点任务,这在地图上最容易实现:
右键单击地图,然后选择 任务 | 绘制.
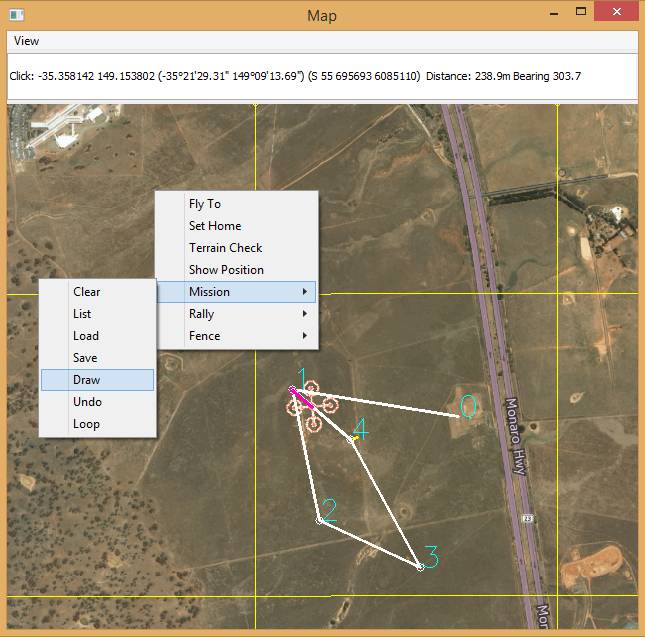
MAVProxy:绘制任务菜单(此图片用于 Copter,但行为相同)。¶
在地图上左键单击要显示点的位置。
备注
第一次点击时,不会出现任何可见的情况。第二次点击后,线条将连接您的点,显示路径
完成后,右键单击地图,选择 任务环路.
这种方法只允许您创建
mav_cmd_nav_waypoint
命令。您可以在 Linux 上使用 未接 模块模块 负荷 未接).目前在 Windows 上这一功能已被破坏。也可以从文件加载其他类型的命令。
提示
在任何时候,您都可以将模式设置为
保持并将其设置为 自动.
改变模式¶
罗孚支持少量模式,您可以在 MAVProxy
与 模式 指挥:
指导>; 模式
指导>; ('可用模式:';, ['自动';, 'guided';, '手册';, '学习';, 'RTL';, '初始化';, 'HOLD';, '转向';])
有用的模拟模式有
自动- 执行任务指导- 按指挥中心的指示移动RTL- 返回发射保持- 等待 - 暂停任务/停止移动。
如上一节所示,您可以通过指定
模式 modename.大多数模式只需输入模式名称即可设置,例如 rtl, 载具, 持有.
测试载具¶
MAVProxy 可以列出影响载具和模拟的所有参数,使用 停止 展览 *并使用
停止 设置 参数名称 价值.除了影响载具本身外,一些参数还模拟特定硬件组件和环境(如风)的性能/故障。这些参数可通过以下方式列出 :ref:`param show sim*`.主题 使用 SITL 进行 ArduPilot 测试<using-sitl-for-ardupilot-testing>; 详细介绍了如何使用 SITL 进行测试。