平面 SITL/MAVProxy 教程¶
本教程简要介绍了如何使用 SITL 和 MAVProxy 对于 固定翼飞行器 测试。
概述¶
这篇文章主要面向希望使用 SITL 测试新 Plane 版本和错误修复的开发人员。 MAVProxy.它展示了如何起飞、执行任务、在 指导 模式、设置地理围栏以及执行其他一些基本测试任务。
该教程是对主题的补充 使用 SITL 进行 ArduPilot 测试.
备注
我们使用 MAVProxy 但您可以 将另一个地面站连接到 SITL 如果您愿意,也可以使用类似的说明(任何 GCS 都可以使用)。
先决条件¶
本教程假定您已经设置了 Windows操作系统上的 SITL 或
Linux操作系统 并使用 --地图 和 --控制台 选项:
CD ~/ardupilot/ArduPlane
模拟载具.py --地图 --游戏机
备注
如果您希望在不同的地图位置开始模拟,或使用与标准副翼/升降舵/方向舵/油门飞机不同的框架类型(-f 选项用于垂直起降固定翼飞行器、萤火虫飞机等),请参阅 SITL 高级测试.使用 -help 选项可以找到模拟器启动选项的完整列表:
模拟载具.py --帮助
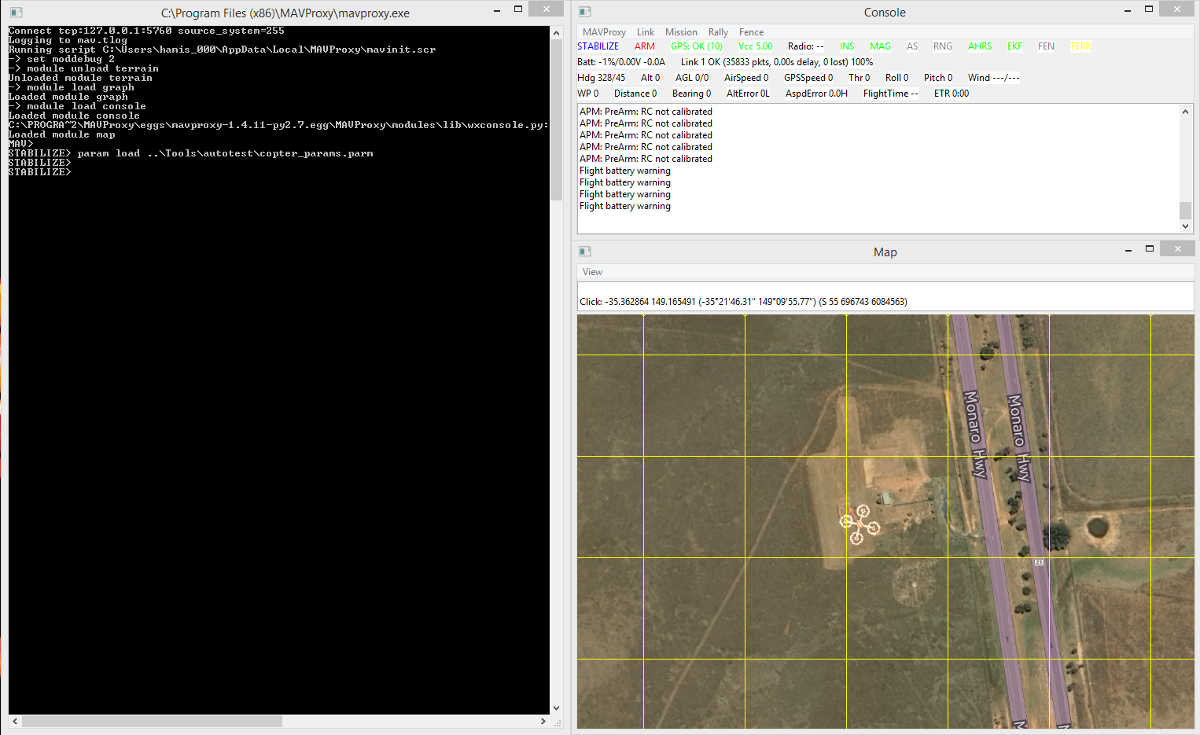
"这款" MAVProxy 命令提示符, 控制台 和 地图 应方便安排,以便同时观察状态和发送命令。
起飞¶
要使用 Plane 起飞,您可以使用一个任务(自动模式),其中包含 mav_cmd_nav_takeoff 命令,或使用 "起飞 "模式。如果是垂直起降固定翼飞行器,您还可以使用 QLOITER、QHOVER 或 QSTABILIZE 等 VTOL 模式起飞,方法是将油门提高到中杆以上(使用正常默认值,例如 RC 3 1600 命令)。在空中飞行后,您可以切换到其他 飞行模式 (请确保您的节流阀设置为该模式的适当值)。
首先加载 CMAC-circuit.txt 使用 wp 负荷
如下图所示(该任务包含起飞指令):
wp 负荷 ..\工具\自动测试\通用任务\CMAC-线路.文本
wp 清单
任务加载完成后,您就可以启动油门起飞,并将模式设置为 自动 (这些操作的顺序并不重要):
模式 载具
上膛 throttle
飞机起飞高度应为 40 米,然后飞过其他任务航点(大部分航点的高度为 100 米)。您可以随时通过更改模式来停止/暂停任务。
监测¶
在起飞过程中,您可以通过控制台上的 Alt field.
开发人员可能会发现 示意图 起飞时,首先输入 起飞 指挥。
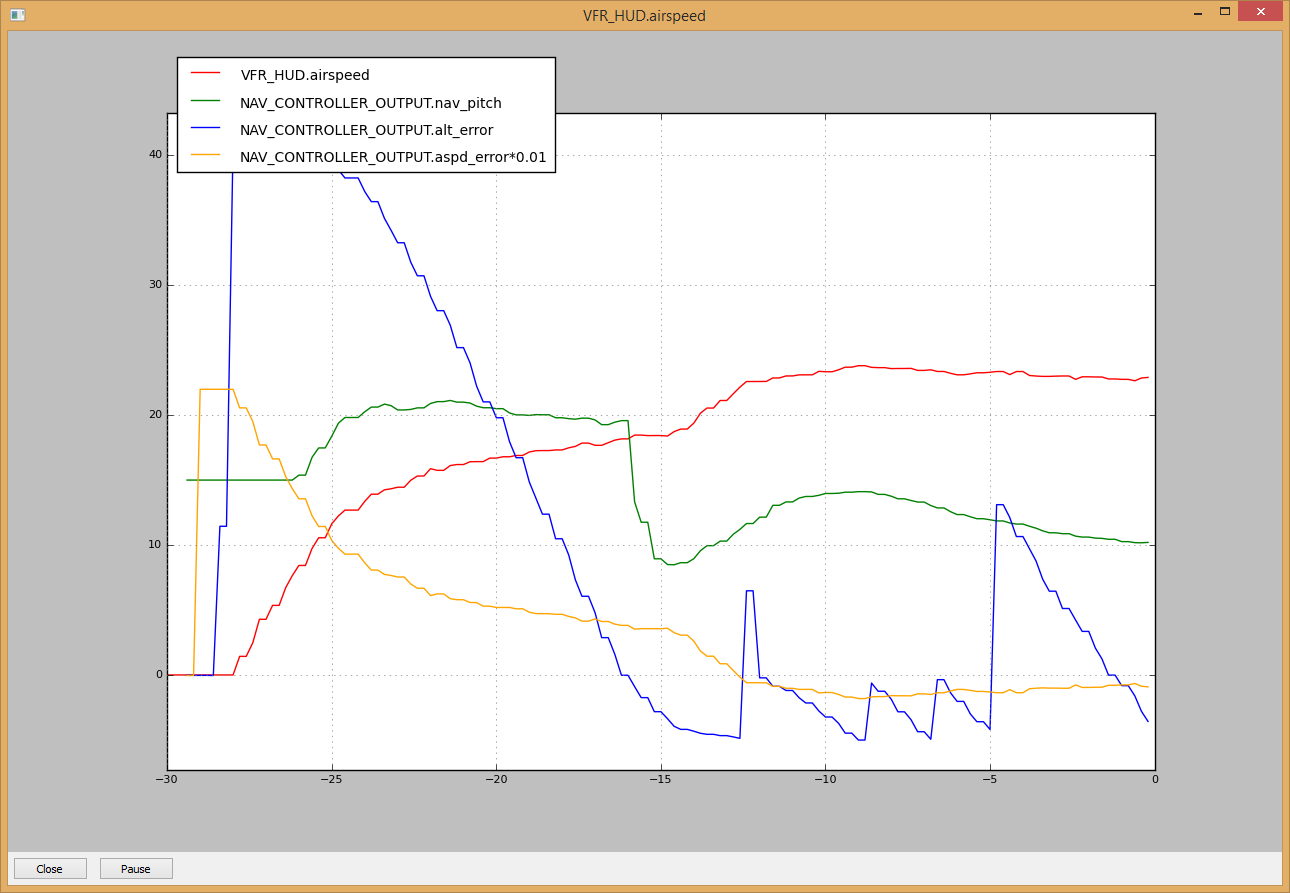
MAVProxy:飞机起飞图(gtakeoff)¶
故障排除¶
造成起飞困难的最常见原因是
使用不包含起飞指令的飞行任务!
载具未上膛时试图起飞。如果载具未能通过预上膛检查,就可能发生这种情况。
您可以列出所有 启用 使用命令 上膛 清单:
土地>; 上膛 清单
土地>; 一应俱全
参数
电压
指北针
电池
保险
rc
巴罗
全球定位系统
您可以使用 上膛 查看 n 和
上膛 取消勾选 n n 分别是检查的名称。使用
n 的价值 一应俱全 来启用/禁用所有检查。
飞行任务¶
您可以随时使用 wp 负荷 命令。一旦载具上膛完毕,任务就会立即开始,而你也会在
自动 模式。
下面的示例展示了如何加载并启动其中一个测试任务,然后跳到第二个航点。 wp 设置 n和 环 任务:
wp 负荷 ..\工具\自动测试\通用任务\CMAC-线路.文本
模式 载具
wp 设置 2
wp 环
"这款" MAVProxy 航点文档 列出了全部可用命令(也可以在命令行输入 "wp",使用自动完成功能获取)。
如果您想创建一个航点任务,这在地图上最容易实现:
右键单击地图,然后选择 任务 | 绘制.
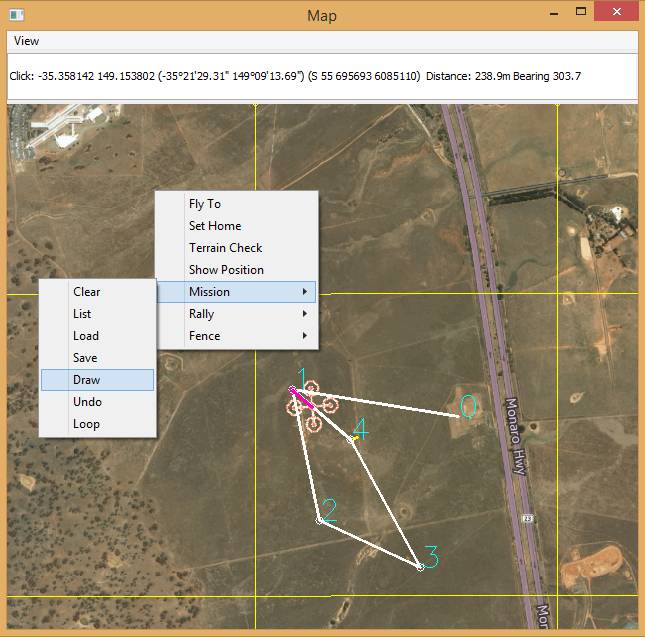
MAVProxy:绘制任务菜单¶
在地图上左键单击要显示点的位置。
备注
第一次点击时,不会出现任何可见的情况。第二次点击后,线条将连接您的点,显示路径。
完成后,右键单击地图,选择 任务环路.
这种方法只允许您创建
mav_cmd_nav_waypoint
命令。您可以在 Linux 上使用 未接 模块模块 负荷 未接).目前在 Windows 上这一功能已被破坏。也可以从文件加载其他类型的命令。
更改飞行模式¶
平面支持 飞行模式数您可以在 MAVProxy 使用 模式 指挥:
自动>; 模式
(自动>; ''土地', '自动飞行稳定调整', '稳定', '自动', '指导', '莱特', '手册', 'FBWA', 'FBWB', '巡航', '初始化', '圆圈', 'ACRO'])
输入 模式 MODENAME 在 MAVProxy 命令提示符.
例如,下面的命令显示了如何将 Plane 放入 环形模式 (这与 "着陆"(Loiter)类似,只是飞机不会试图保持位置)。
模式 圆形
引导载具¶
起飞后,您可以在地图上移动载具。
指导 模式。飞机将飞到指定点,然后绕其飞行。
首先更改模式:
模式 导游
设置目标点的最简单方法是右键单击地图上您想去的地方,选择 飞往然后输入目标高度。
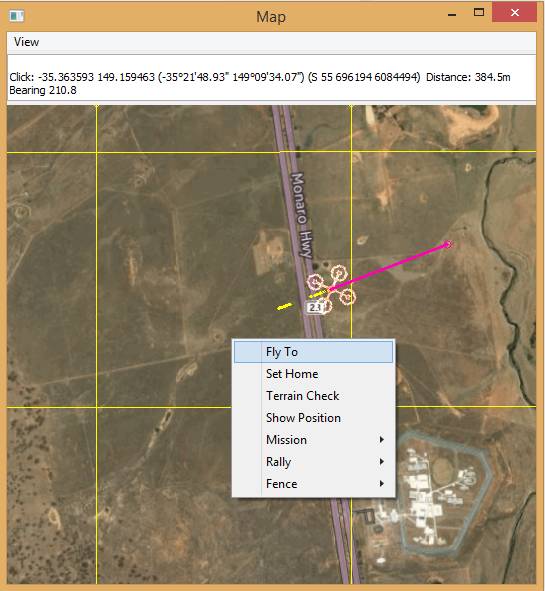
MAVProxy:飞往位置¶
您也可以使用以下两种格式在命令行中手动输入目标位置。如果只指定了高度,则将使用上次指定的 LAT/LON 格式。
导游 纬度
导游 LAT 伦敦 纬度
备注
与 Copter 不同,您不能用 Plane 做太多事情。 指导
模式,因为该模式不支持很多命令。该模式主要用于简单地飞到某个点。
设置地理围栏¶
地理栅栏(GeoFence)是 Plane 用来限制飞行器移动(并在失去控制时将其移动到安全位置)的虚拟屏障。Plane 允许您在地图上指定一个任意形状的区域作为栅栏,并指定上下高度。如果栅栏被突破,Plane 会飞向栅栏中心并绕圈(或集结点)。 平面地理围栏 更详细地介绍了栅栏。
使用 平面围栏参数.您可以使用 停止 展览:
指导>; 停止 展览 篱笆*
指导>; 栅栏行动 1.000000
围栏自动启用 0.000000
栅栏 0.000000
FENCE_MAXALT 0.000000
栅栏_MINALT 0.000000
FENCE_RETALT 0.000000
栅栏_ret_rally 0.000000
栅栏总计 7.000000
创建栅栏与创建航点任务非常相似:
右键单击地图,然后选择 栅栏.
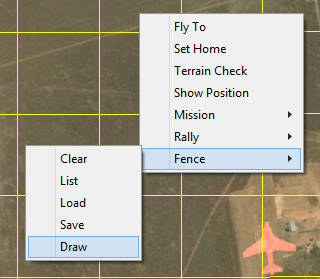
MAVProxy:绘制栅栏菜单¶
左键单击地图上您希望出现栅栏 "柱子 "的位置。
备注
第一次点击时,不会出现任何可见的情况。第二次点击后,线条将连接您的点,显示路径。
完成后,您可以在地图上单击右键,环绕栅栏。
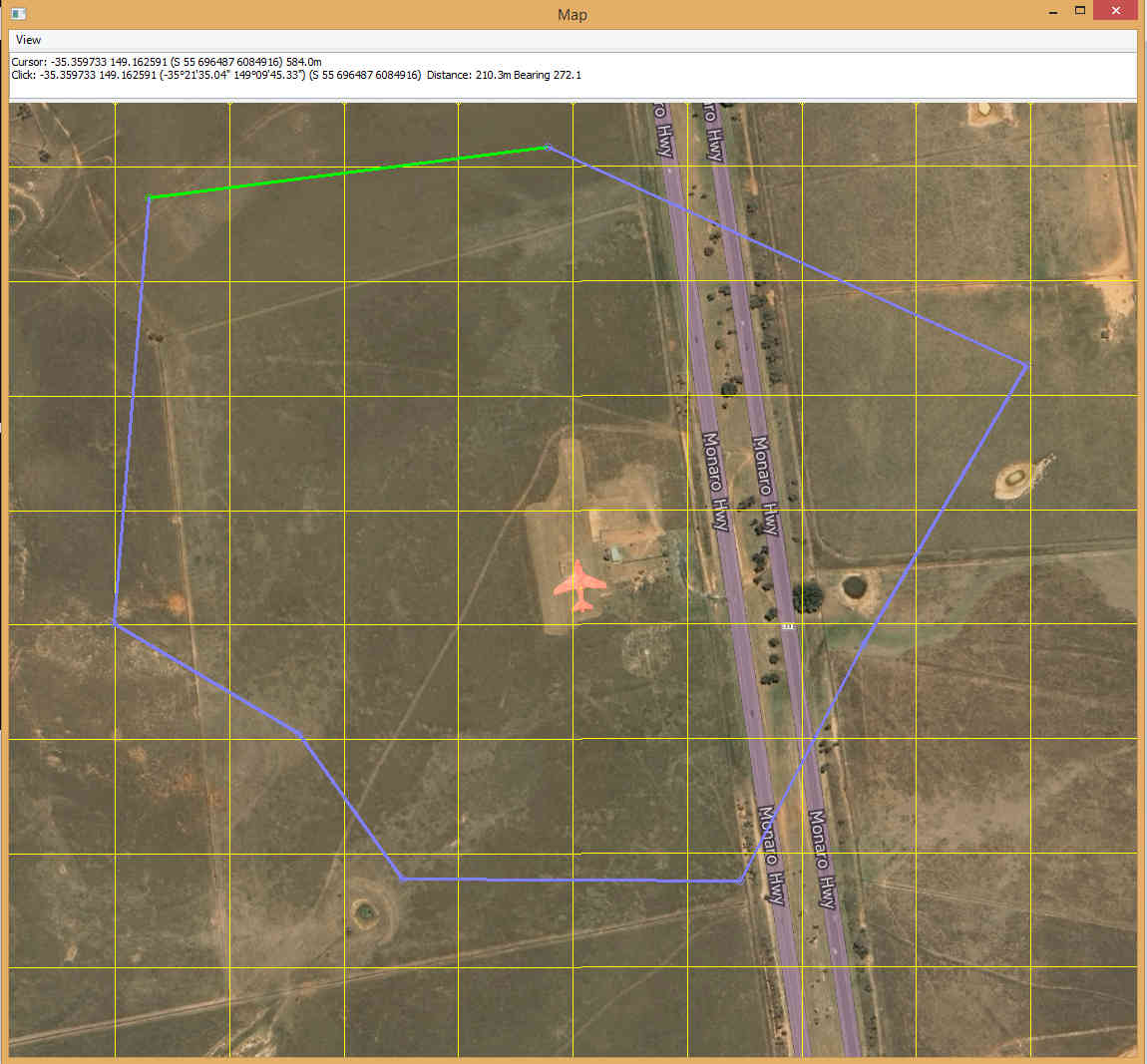
MAVProxy:绘制栅栏点¶
栅栏最初是禁用的。要将其打开,请将数值设为 1:
指导>; 篱笆 以便
现在让飞机穿越障碍。假设您已经在飞行,您可以使用下面的方法让飞机笔直地飞向栅栏:
指导>; 模式 巡航
当栅栏被越过时,飞机将飞到栅栏区域的中心,然后绕圈。控制台显示已发生突破。
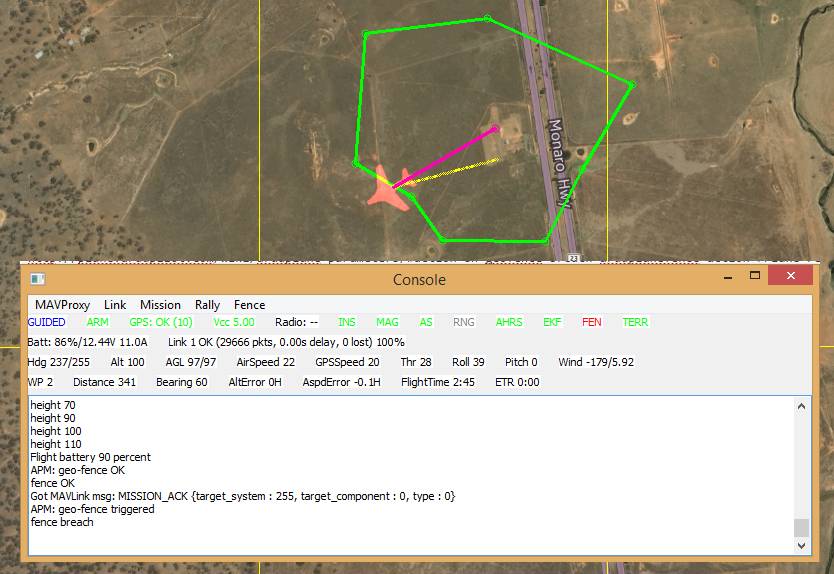
MAVProxy:控制台和地图上显示栅栏缺口¶
与其飞到栅栏中心,不如在栅栏上添加一个
号召力
并通过启用参数 栅栏_ret_rally.
测试载具¶
MAVProxy 可以列出影响载具和模拟的所有参数,使用 停止 展览 *并使用
停止 设置 参数名称 价值.除了影响载具本身外,一些参数还模拟特定硬件组件和环境(如风)的性能/故障。这些参数可通过以下方式列出 停止 展览 模拟*.主题 使用 SITL 进行 ArduPilot 测试 详细介绍了如何使用 SITL 进行测试。