爱因斯坦 US-D1 雷达高度计¶
"这款" 爱因斯坦 US-D1 雷达高度计 它的传输距离为 50 米,更新频率为 100 赫兹,重量仅为 110 克。
警告
目前,制造商警告说,由于多路径反射,在室内操作可能会有问题......建议谨慎操作
该雷达装置的用户手册可查阅 这里。

备注
ArduPilot 固件 4.0 及更高版本支持该传感器
购买地点¶
可通过以下途径购买 爱因斯坦的网站。
连接(飞行)控制器¶
USD1 有串行和 DroneCAN 两种版本。
串行连接可以使用任何空闲的串行/UART 端口。下面的示例显示了如何连接 SERIAL4 作为第一个测距仪。
serial4_protocol = 9(激光雷达)
SERIAL4_BAUD = 115(115200 波特)
RNGFND1_TYPE = 11(1 美元-序列)
RNGFND1_MIN_CM = 50
RNGFND1_MAX_CM = 4500
rngfnd1_gndclear = 10 或者更准确地说,是载具着陆时测距仪到地面的距离(以厘米为单位)。该值取决于您安装测距仪的方式。
对于 CAN 版本,通过 CAN 与(飞行)控制器连接并设置以下参数:
CAN_P1_DRIVER = 1(第一个 can 端口驱动程序设置为驱动程序 1)
can_d1_protocol = 7 (司机 1 的 1 美元协议)
RNGFND1_TYPE = 33 (usd1_can)
RNGFND1_MIN_CM = 50
RNGFND1_MAX_CM = 4500
rngfnd1_gndclear = 10 或者更准确地说,是载具着陆时测距仪到地面的距离(以厘米为单位)。该值取决于您安装测距仪的方式。
测试传感器¶
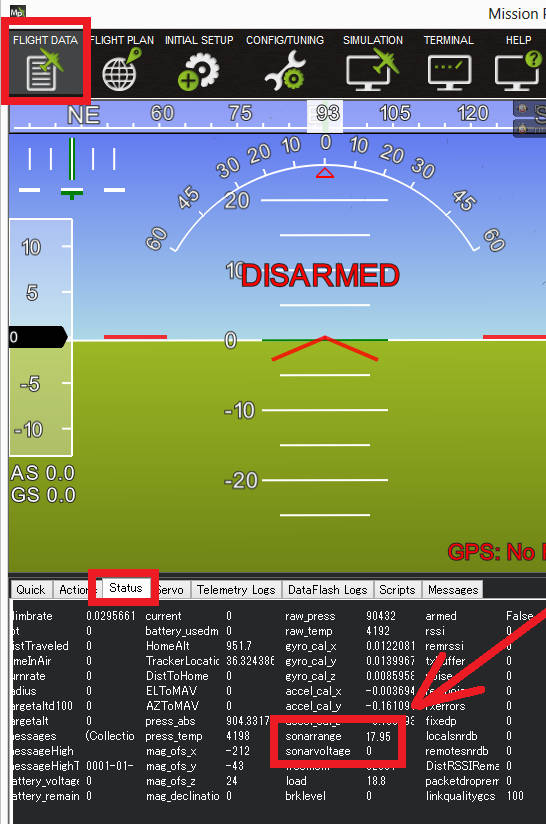
传感器读取的距离可在Mission Planner地面站飞行数据屏幕的状态选项卡中查看。仔细查看 "sonarrange"(声纳范围)。
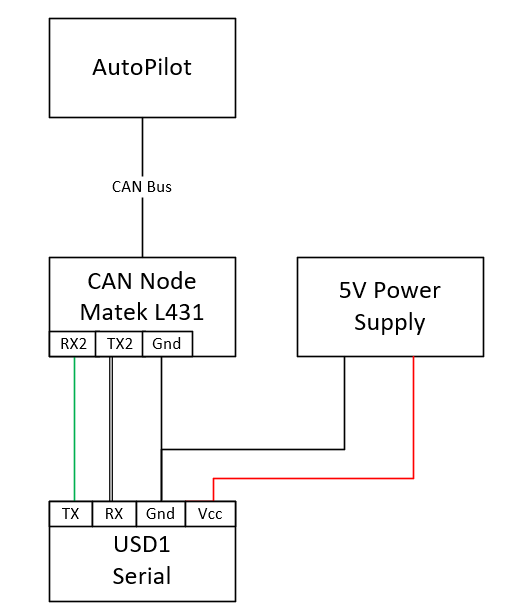
将传感器与 AP Periph DroneCAN 节点配合使用¶
USD1 有 CAN 或串行通信协议两种版本。USD1 CAN 协议与 DroneCAN 不同,因此需要一个运行该协议的专用 CAN 端口。如果(飞行)控制器没有用于连接 USD1 的备用 CAN 端口或备用串行端口,但设置了 DroneCAN 端口,则可以使用连接到 DroneCAN 端口的 AP_Periph CAN 节点在系统中创建另一个串行端口。USD1 必须是串行版本才能正常工作。
要将 USD1 与 Matek AP_Periph CAN 节点 L431 等 CAN 节点配合使用,请使用以下设置。
首先,用具有测距仪功能的固件闪存 AP_Periph 设备。对于 Matek AP_Periph CAN 节点 L431,最新的稳定固件是 这里。
将 CAN 节点中的参数设置如下:
rngfnd_baudrate = 115
rngfnd_max_rate = 50
RNGFND_PORT = 1(UART 2,即 TX2、RX2)
RNGFND1_ORIENT = 0(无论方位如何)
rngfnd1_type = 11
警告
RNGFND_PORT 的索引与电路板上 UART 的索引不同。如果 RNGFND_PORT = 0,则使用电路板上的 RX1 和 TX1 等。
接下来,设置(飞行)控制器的参数:
RNGFND1_TYPE = 24 (DroneCAN) 然后重启
RNGFND1_ORIENT = 25(下降)
RNGFND1_ADDR = 0(传感器 ID = 0)
备注
如果系统中不止一个测距仪,则需要确定 USD1 的传感器 ID。 在 CAN 检查器中查找 "uavcan_equiment_range_sensor_Measurement"("uavcan_测距仪传感器测量")信息,了解其传感器 ID。