FlywooF405 Pro¶

规格¶
处理器和传感器
STM32F405 ARM 微控制器
ICM42688 IMU(陀螺仪和加速度计)
BMP280 气压计
AT7456E OSD
16Mbytes 日志闪存
接口
9x PWM 输出(PWM9 用于 Neopixel LED)
1x RC 输入(PWM/PPM,SBUS)
6 个串行端口输入(包括上述 RC 输入)
1x I2C,用于外部罗盘或空速传感器
4 合 1 电调连接器
DJI Air Unit 连接器
USB-C 连接器
电源
9V ~ 25V 直流输入电源(3S-6S)
用于外设的 5V 2A BEC
10V 2A 用于视频
尺寸和规格
20mm x 20mm 或 30.5mm x 30.5mm 安装模式
5.5g
购买地点¶
可从各种零售商处或直接从制造商处购买 飞宇
引脚¶
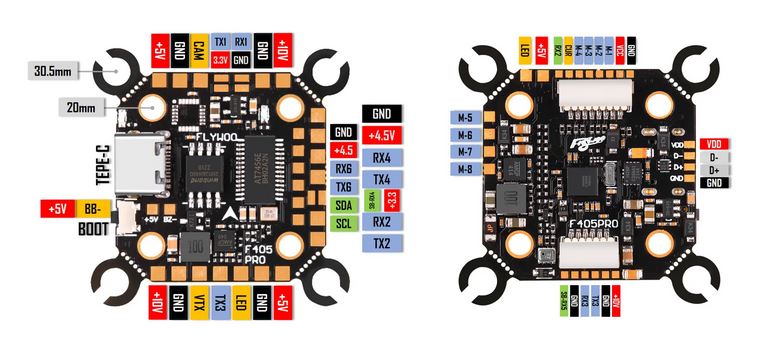
UART 默认值¶
在上述引脚布局中,UART 的标记为 Rn 和 Tn。Rn 引脚是 UARTn 的接收引脚。Tn 引脚是 UARTn 的发送引脚。
SERIAL0 -> USB
SERIAL1 -> USART1 (GPS)
SERIAL2 -> USART2(仅 RX,ESC 遥测)
SERIAL3 -> USART3(DJI,启用 DMA)
SERIAL4 -> UART4(SBUS 引脚反相并连接至 RX 引脚)(启用 TX DMA) 用于正常 UART 使用、 BRD_ALT_CONFIG = 1.
SERIAL5 -> UART5(RX5 由连接到 DJI 连接器 SBUS 引脚的反相器提供,无 TX 引脚)
SERIAL6 -> UART6(RC 串行输入,支持 DMA)
RC 输入¶
RC 输入配置在 SBUS 引脚上,SBUS 引脚为反相,并为 R4(UART4_RX)引脚供电,适用于大多数 RC 单向协议,包括 PPM。
CRSF/ELRS/SRXL2 与 UART6 的连接已预先配置。
DJI 连接器的 SBUS 输入只能用于 SBUS,但 serial5_protocol 必须设置为 "23",并且 serial6_protocol 必须改为 "23 "以外的内容。
Dshot 能力¶
FlywooF405 Pro 支持多达 9 路 PWM 输出。M1 至 M4 输出位于 esc 连接器上,支持双向 DShot,M5 至 M8 位于焊盘上,支持 DShot,另外还有 LED 焊盘(PWM 输出 9),用于 LED 灯条或其他 PWM 输出。
PWM 分为 3 组:
PWM 1-2,5,7 在第 1 组中
第 2 组 PWM 3-4
第 2 组 PWM 6,8
第 3 组 PWM 9
同一组内的通道需要使用相同的输出协议。如果一个组中的任何通道使用 DShot,那么该组中的所有通道都需要使用 DShot。通道 1-4 也支持双向 DShot。
GPIO¶
FlywooF405 Pro 输出可用作 GPIO(继电器、按钮、RPM 等)。要使用它们,您需要设置输出的 SERVOx_FUNCTION 为-1。参见 GPIO 页面获取更多信息。
ArduPilot 中 PIN 变量的 GPIO 编号为
PWM1 50
PWM2 51
PWM3 52
PWM4 53
PWM5 54
PWM6 55
PWM7 56
PWM8 57
PWM9 58
RSSI / 模拟空速输入¶
提供了一个模拟输入端,其参考引脚编号为 "10"。
OSD 支持¶
FlywooF405 Pro 的板载 OSD 使用 OSD_TYPE = 1(MAX7456 驱动器)。CAM 和 VTX 引脚为使用内部 OSD 提供连接。
DJI 视频和 OSD¶
JST-GH-6P 连接器支持标准的 DJI HD VTX 连接,默认情况下 SERIAL3 已为此进行了设置。该连接器的 1 号针脚电压为 10V,因此请注意不要将其连接到任何需要 5V 电压的外设上。
电池监测¶
电路板上有一个内部电压传感器和用于外部电流传感器输入的电调连接器。电压传感器最多可处理 6S 锂聚合物电池。
默认电池参数为
BATT_MONITOR = 4
BATT_VOLT_PIN = 13
BATT_CURR_PIN = 12
BATT_VOLT_MULT = 11.0
batt_amp_pervlt = 58.8(需要根据安装的电流传感器进行调整)
指南针¶
FlywooF405 Pro 没有内置指南针,但可以使用 SDA 和 SCL 焊盘上的 I2C 连接外部指南针。
固件¶
该电路板未预装 ArduPilot 固件。请使用此处的说明首次加载 ArduPilot 在没有现有 ArduPilot 固件的电路板上加载固件.
可以找到该电路板的固件 这里 子文件夹中的 "FlywooF405Pro"。固件仅为 Copter/Heli 提供,但可使用 ArduPilot 定制固件构建服务器