无线电链接迷你像素¶
警告
我们不推荐使用这种(飞行)控制器,因为尽管制造商多次努力使其与 ArduPilot 官方软件兼容,但某些版本的电路板仍与 ArduPilot 官方软件不兼容。制造商显然也没有遵守 GPLv3 许可,该许可要求向客户发布修改后的源代码。"V1.0 "和 "V1.2 "可能能用,"V1.0 II "和 "V1.1 "肯定不能用。
警告
ArduPilot 不支持 RadioLink CrossFlight。据 ArduPilot 开发团队所知,RadioLink 违反了 ArduPilot 的 GPLv3 许可,因为他们拒绝发布对 ArduPilot 进行修改的源代码。开发团队建议您不要购买该产品,而是从我们支持的其他众多板卡中选择一款。

上图和部分内容由 无线电链接网站
规格¶
处理器和传感器
STM32F405VGT6 ARM 微控制器
InvenSense MPU6500
Compass QMC5883L
气压计 LPS22HB
接口
6x PWM 输出
1x RC 输入(PWM/PPM,SBUS)
3 个 UARTS(Telem 1 & 有流量控制;2,GPS 端口无流量控制)
外部 I2C
2 x ADC,用于电压和电流传感器
1 x 用于模拟 RSSI 或模拟空速的附加 ADC
SDIO microSD 卡插槽
微型 USB 连接器
根据套件功能,包括蜂鸣器/安全开关、电源模块、I2C 扩展板和 TS100 GPS/ Mag 组合
尺寸 39 x 39 x 12 毫米
重量 12 克(不含导线
购买地点¶
无线电链接硬件可从各种仓库获得,如 banggood.com
外设连接¶
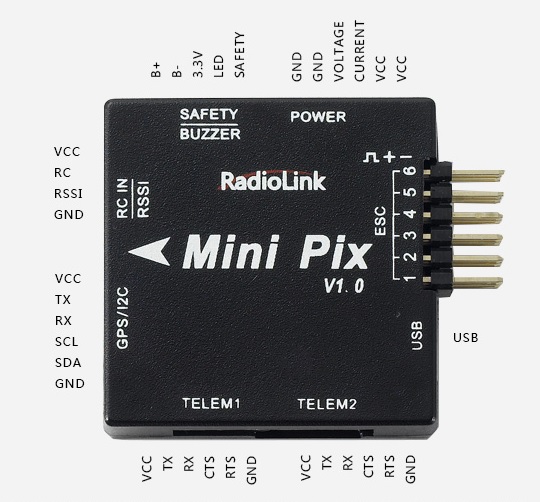
默认 UART 顺序¶
SERIAL0 = 控制台 = USB
SERIAL1 = Telemetry1 = USART3
SERIAL2 = Telemetry2 = USART2(请参阅注释,了解反向塑料外壳标签!)。
serial3 = gps1 = uart4
串行协议可根据个人喜好进行调整。
固件处理¶
该硬件预装了 RadioLink 品牌版本的 ArduCopter 和兼容 ArduPilot 的引导加载程序。要使用基于 ChibiOS 的非品牌 ArduPilot 固件版本,请从以下网址下载所需的载具固件 .apj 文件 https://firmware.ardupilot.org/ 并使用 MissionPlanner 的 "自定义固件 "选项闪存电路板。
如果需要重新安装引导加载程序,可以使用以下焊点将电路板引导至 DFU 模式:
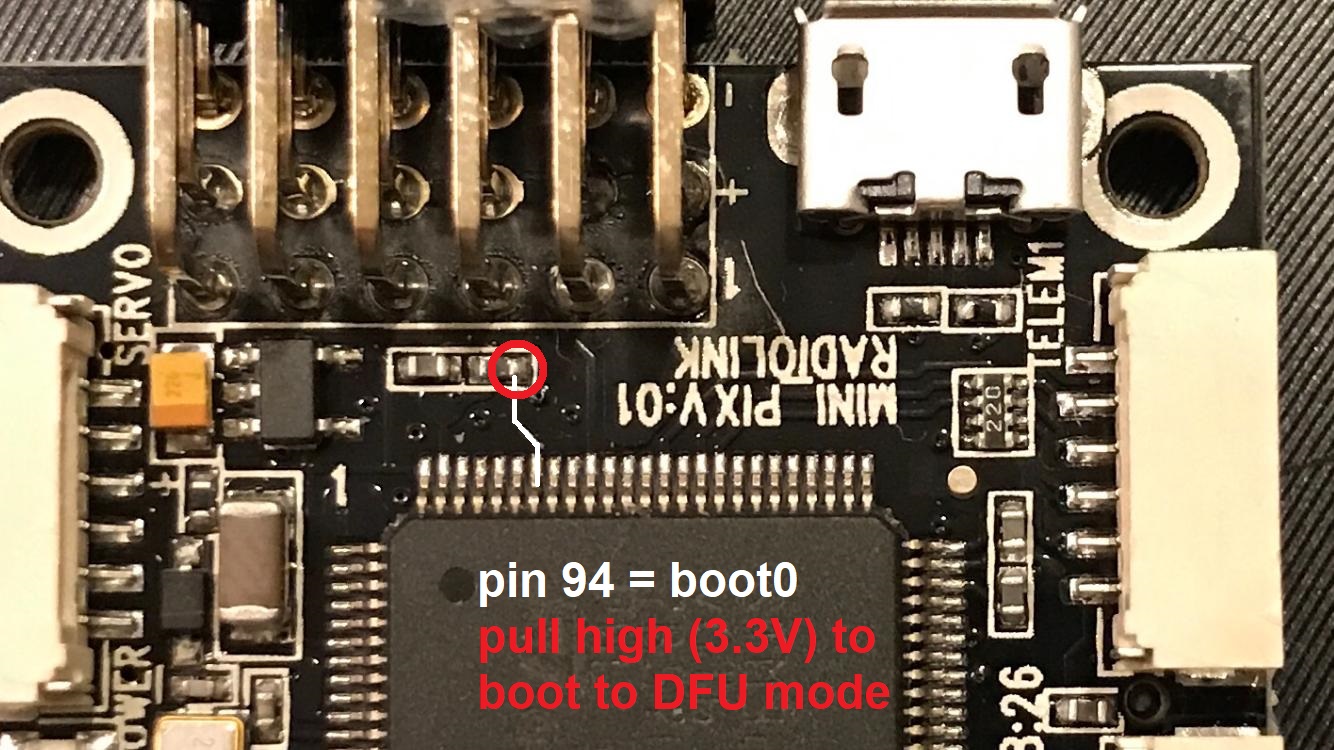
然后按照说明操作 为 ChibiOS 板加载固件.
警告
飞行控制器的塑料外壳上显示的遥测端口号与电路板的 PCB 印记和固件的 SERIALn 分配相反,这需要额外注意!
备注
MiniPix 电压和电流传感引脚使用 Pixhawk 标准 ( BATT_VOLT_PIN = 2, BATT_CURR_PIN = 3).附加 ADC 引脚可用于 RSSI 或模拟空速。将所需选项设为 PIN = 11。