曼巴 H743v4¶
MambaH743v4 是由以下公司生产的(飞行)控制器 迪亚通.
规格¶
处理器
运行频率为 480 MHz 的 STM32H743 32 位处理器
OSD - AT7456E
128MB 数据记录闪存
传感器
双 MPU6000(A 版)或 BMI270(B 版)
DPS280
电源
6.8V ~ 26V 直流输入电源
用于外设的 5V 3A BEC
用于视频的 9V 3A BEC
接口
8 UARTS
9x PWM 输出
用于外部罗盘、空速传感器等的 I2C 端口。
USB 端口
尺寸和规格
38 毫米 x 38 毫米 x 7.5 毫米
11g
引脚¶
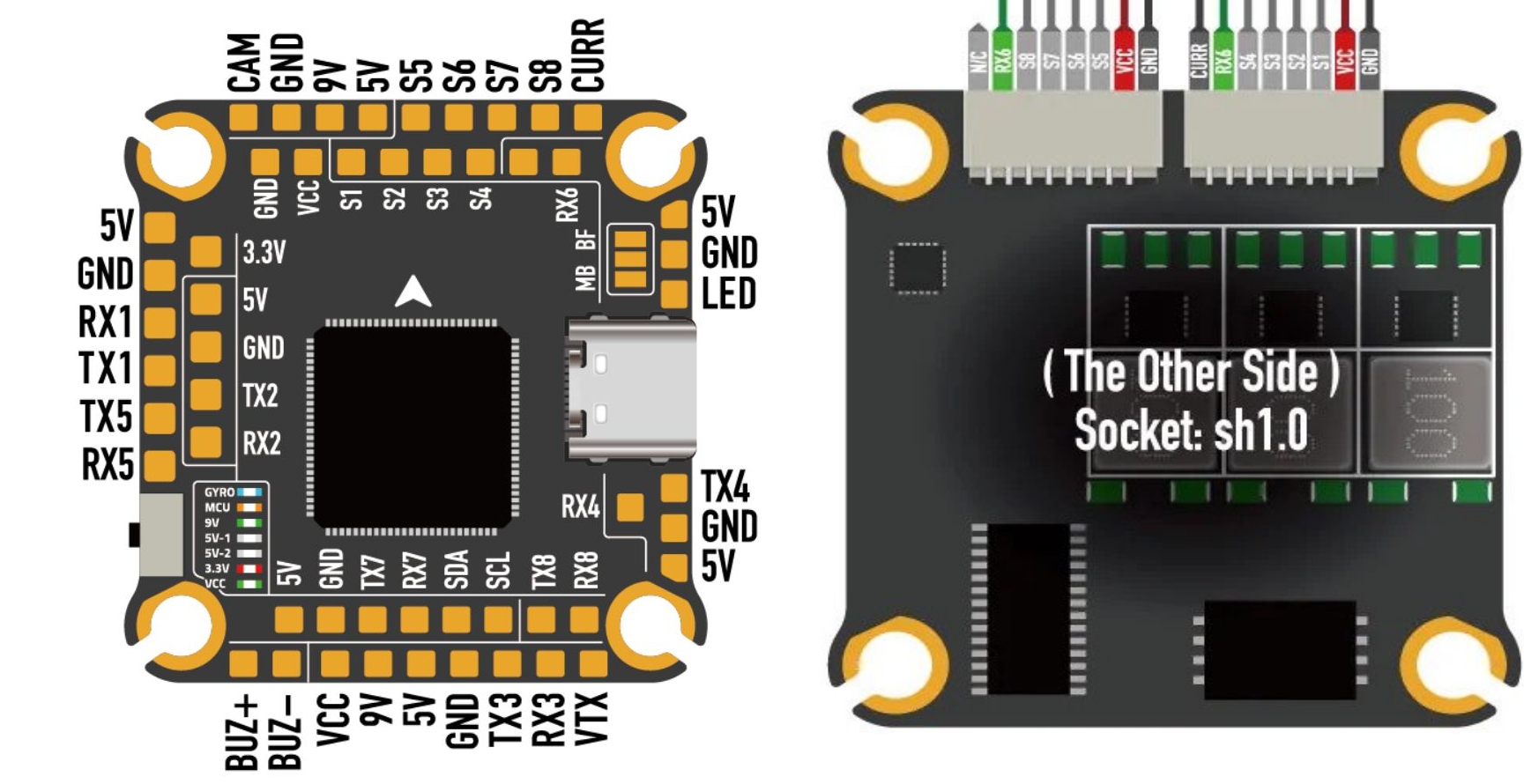
UART 映射¶
在上述引脚布局中,UART 的标记为 RXn 和 TXn。RXn 引脚是 UARTn 的接收引脚。TXn 引脚是 UARTn 的发送引脚。每个端口的默认协议如图所示,用户可自行更改。
SERIAL0 -> USB
SERIAL1 -> USART1(RX/SBUS,支持 DMA)
SERIAL2 -> USART2 (TELEM2)
SERIAL3 -> USART3 (GPS)
SERIAL4 -> UART4(GPS,支持 DMA)
SERIAL5 -> UART5
SERIAL6 ->USART6(电调遥测)
SERIAL7 -> UART7(启用 DMA)
SEIRAL8 -> UART8
RC 输入¶
RC 输入配置在 RX1 (UART1_RX) 引脚上。它支持所有串行 RC 协议。
serial1_protocol 默认设置为 "23":
不支持 PPM。
SBUS/DSM/SRXL 连接到 RX1 引脚,但 SBUS 要求 serial1_options 设置为 "3"。
FPort 需要连接 TX1 和 serial7_options 设置为 "7"。
除 RX1 外,CRSF 还需要 TX1 连接,并自动提供遥测功能。设置 serial1_options 为 "0"。
SRXL2 需要与 TX1 连接,并自动提供遥测功能。设置 serial1_options 到 "4"。
任何 UART 都可用于 ArduPilot 中的遥控系统连接,并与除 PPM 之外的所有协议兼容。请参见 无线电控制系统 了解详情。
FrSky 遥测技术¶
FrSky 遥测支持使用任何 UART TX 引脚。要启用 FrSky S.PORT 支持,您需要设置以下参数(以 UART5 为例)
serial5_protocol = 10
serial5_options = 7
OSD 支持¶
MambaH743v4 支持 OSD,使用 OSD_TYPE = 1(MAX7456 驱动器)。
PWM 输出¶
MambaH743v4 最多支持 9 个 PWM 输出。电机输出 M1 至 M8 的焊盘位于电机连接器和单独的焊盘上,M9 位于单独的焊盘上,用于 LED 灯条或其他 PWM 输出。
PWM 分为 4 组:
第 1 组 PWM 1-4
第 2 组 PWM 5,6
第 3 组中的 PWM 7、8
第 4 组 PWM 9
同一组内的通道需要使用相同的输出率。如果一个组中的任何通道使用 DShot,那么该组中的所有通道都需要使用 DShot。通道 1-8 支持双向 DShot。
备注
对于从 BetaflightX 四面体迁移过来的用户,前四个输出 M1-M4 已配置为使用这些默认参数与现有电机接线一起使用:
电池监测¶
电路板没有内置电流传感器。电压传感器最多可处理 6S 锂聚合物电池。
典型的电池设置参数为
BATT_MONITOR = 4
BATT_VOLT_PIN = 11
BATT_CURR_PIN = 13
BATT_VOLT_MULT = 11.1
batt_amp_pervlt = 64(取决于外部电流传感器)
指南针¶
MambaH743v4 没有内置指南针,但可以使用 SDA 和 SCL 焊盘上的 I2C 连接外部指南针。
固件¶
可以找到该电路板的固件 这里 在标有 "MambaH743v4 "的子文件夹中"。
加载固件¶
初始固件加载可通过 DFU 完成,方法是插入 USB 并按下引导加载器按钮。然后,使用自己喜欢的 DFU 加载工具加载 "with_bl.hex "固件。
加载初始固件后,您可以使用任何 ArduPilot 地面站软件更新固件。以后的更新应使用 *.apj 固件文件。