IFlight Beast H7 55A AIO¶
规格¶
处理器
STM32H743 BGA ARM(489MHz),1MB 闪存
集成 4 输出 BLHeli-S 55A 电调
传感器
InvenSense MPU6000 IMU(加速度、陀螺仪)
DSP310 气压计(不在 V2 版本中)
电压放大器;300A 电流传感器
电源
7.4V ~ 25V 直流输入电源
用于外设的 5V 2.5A BEC
接口
5x UARTS
5x PWM 输出,前 4 个内部连接至 4in1 45A BLHeli-S ESC,第 5 个用于 LED
I2C 端口,用于外接罗盘、空速传感器等。
USB 端口
16MB 板载闪存用于记录(设置为 日志后端类型 =4)
摄像机输入/ VTX 输出
300A 电流传感器
内置 OSD
尺寸和规格
32.5 毫米 x 32.5 毫米(25.5 x 25.5 毫米安装模式)
8.5g
警告
该电路板没有指南针,也无法连接外部指南针。需要精确航向信息的应用必须依赖 ArduPilots 无罗盘操作 操作。
无气压操作¶
根据版本的不同,该(飞行)控制器可能不包括用于高度信息的气压计传感器,因此其操作模式受到限制:
固定翼飞行器¶
任何操作都必须提供高度源。安装 GPS 并按照 使用 GPS 进行高度感应.
旋翼飞行器¶
可以在 ACRO 和 STABILIZE 模式下上膛和运行。也可以在 ALTHOLD(高度保持)模式下上膛和飞行,但高度保持性能完全依赖于加速度计/陀螺仪,可能会非常差,甚至导致坠机,因此不建议使用。与 "飞机 "一样,您可以使用 GPS 获取高度数据,但也可以使用测距仪和信标。 EK3_SCRX_POSZ 适当设置参数。
无人车UGV¶
漫游车不需要高度源,而且 EK3_SCRX_POSZ 参数可设置为 "0"
购买地点¶
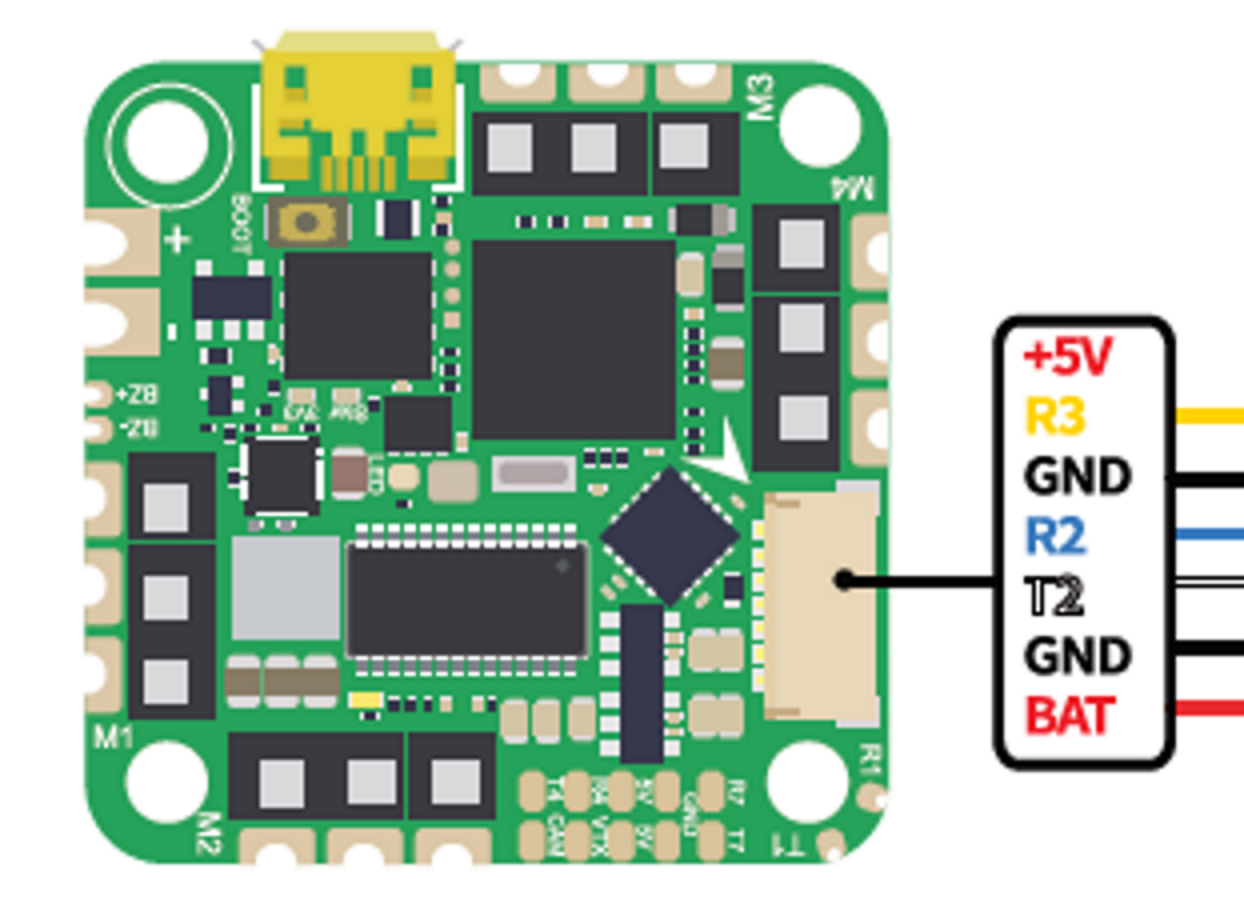
默认 UART 顺序¶
在上述引脚布局中,UART 的标记为 Rn 和 Tn。Rn 引脚是 UARTn 的接收引脚。Tn 引脚是 UARTn 的发送引脚。
SERIAL0 = 控制台 = USB
SERIAL1 = Telemetry1 = USART1(备用 RC 输入/输出)
SERIAL2 = Telemetry2 = USART2(DJI)
SERIAL3 = RC 输入 = USART3
serial4 = gps = usart4
serial7 = user = uart7
UART1 支持 RX 和 TX DMA。UART2、UART3 和 UART4 支持 RX DMA。UART7 支持 TX DMA
RC 输入¶
RC 输入默认通过 USART3 RX 输入配置。它支持除 PPM 之外的所有 RC 协议。FPort 和全双工协议需要同时使用 RX1 和 TX1。
备注
如果接收器是 FPort 或全双工协议,则接收器必须与 USART1 TX 引脚绑定,并且 serial1_options = 7(TX/RX 反相,半双工)、 serial1_protocol 设置为 23,以及 RSSI_TYPE =3.
D 射能力¶
所有电机 1-4 输出都具有双向 Dshot 和 PWM 功能。然而,输出的 Dshot 和正常 PWM 操作混合使用会受到组的限制,即如果要为组中的某个输出启用 Dshot,则需要将该组中的所有输出都配置和用作 Dshot,而不是 PWM 输出。在配置为正常伺服/电机输出时,必须相同(PWM 速率或 Dshot)的输出组为1/4 和 2/3。
新像素输出¶
LED 引脚为 PWM 输出 5,默认设置为与 NeoPixel 4 LED 灯串配合使用,用于发出通知。
电池监控器¶
电路板内置电压和电流传感器。
正确的电池监控器参数是
BATT_MONITOR = 4
BATT_VOLT_PIN = 12
BATT_VOLT_MULT ~ 10.9
BATT_CURR_PIN = 13
batt_amp_pervlt ~ 100
这些都是固件默认设置的。
刷新固件¶
通常,这些电路板在出售时已预先刷入 Betaflight 固件,如果要使用 ArduPilot,则需要更新固件和引导加载程序。请参见 在没有现有 ArduPilot 固件的电路板上加载固件.