Mamba F405 MK2 飞行控制器¶
Mamba F405 MK2 是由以下公司生产的(飞行)控制器 迪亚通.
警告
该(飞行)控制器没有气压计。可添加外部气压计,或使用替代高度传感器进行操作,如室外使用 GPS 或室内使用测距仪,但需注意。在 Plane 模式下,如果 GPS 丢失,用户应立即切换到非导航、非高度保持模式。在 Copter 中,允许使用 GPS 操作,但不建议使用,因为高度保持模式不精确。请注意,如果 GPS 出现故障,而飞行器正在使用 GPS 获取高度信息,那么最终可能会因缺乏准确的高度信息而导致坠机。 使用 GPS 进行高度感应 了解更多信息。
特点¶
STM32F405RGT6 微控制器
MPU6000 IMU
AT7456E OSD
3 个 UART
5 个 PWM 输出端
无气压操作¶
该(飞行)控制器不包括用于高度信息的气压计传感器,因此其操作模式受到限制:
固定翼飞行器¶
任何操作都必须提供高度源。安装 GPS 并按照 使用 GPS 进行高度感应.
旋翼飞行器¶
可以在 ACRO 和 STABILIZE 模式下上膛和运行。也可以在 ALTHOLD(高度保持)模式下上膛和飞行,但高度保持性能完全依赖于加速度计/陀螺仪,可能会非常差,甚至导致坠机,因此不建议使用。与 "飞机 "一样,您可以使用 GPS 获取高度数据,但也可以使用测距仪和信标。 EK3_SCRX_POSZ 适当设置参数。
无人车UGV¶
漫游车不需要高度源,而且 EK3_SCRX_POSZ 参数可设置为 "0"
购买地点¶
可在多家零售商处购买,也可直接从供应商处购买,网址为 diatone.us
引脚¶
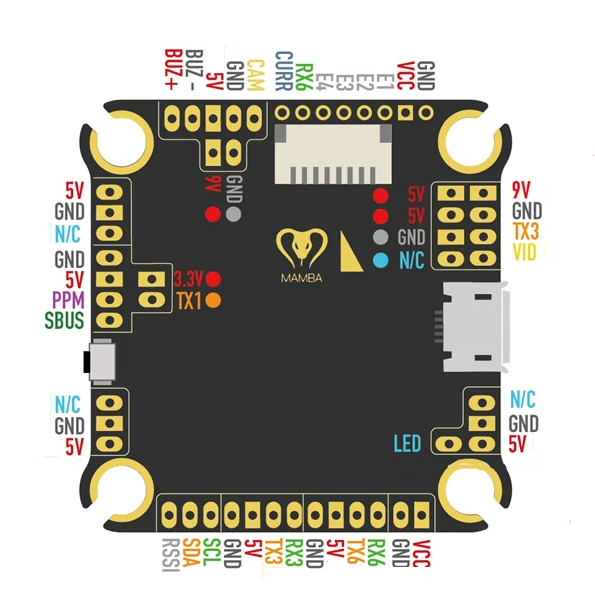
Mamba F405 MK2 板¶
UART 映射¶
名称 |
针脚标签 |
功能 |
|---|---|---|
序号 0 |
USB |
|
序号1 |
PPM / SBUS |
RC 输入(除非使用其他配置,否则 SBUS 引脚必须用于 RC 输入) |
序号3 |
TX3 / RX3 |
UART3(IRC 斜坡) |
序号6 |
TX6 / RX6 |
UART6 (电调遥测) |
BRD_ALT_CONFIG |
PPM 引脚功能 |
|---|---|
ALT 0(默认) |
内部与逆变器绑定,不能从外部驱动 |
ALT 1 |
RX1(PPM)/TX1 |
RC 输入¶
RC 输入配置在 SBUS 引脚上,通过反相器驱动 UART1 RX 引脚。它支持所有 RC 单向协议(即不支持 PPM、FPORT 或其他带遥测功能的双向协议)。 BRD_ALT_CONFIG = 1 启用 RX1 引脚,以便与 CRSF 等双向 RX 配合使用。
OSD 支持¶
Mamba F405 MK2 集成了 OSD。
PWM 输出¶
Mamba F405 MK2 最多支持 5 个 PWM 输出。上图中的电机输出 ESC1 至 ESC4 焊盘用于 4 个输出。前 4 个输出支持双向 DShot 以及所有 PWM 类型。
所有输出通道都在同一组中。
同一组内的通道需要使用相同的输出率和协议。如果组内的任何通道使用 DShot,那么组内的所有通道都需要使用 DShot。
PWM1,4 第 1 组
PWM 2、3 组2
PMW5 第 3 组
电池监测¶
电路板内置电压传感器。电压传感器最多可处理 6S 锂聚合物电池。电调连接器上还提供外部电流传感器输入。
正确的电池设置参数是
BATT_MONITOR = 3
BATT_VOLT_PIN = 11
BATT_VOLT_MULT 11.0
BATT_CURR_PIN = 13
batt_amp_pervlt = 25,配备 Diattone 40A 电调,有时与(飞行)控制器捆绑在一起。
指南针¶
Mamba F405 MK2 没有内置指南针,但可以使用 SDA 和 SCL 焊盘上的 I2C 连接外部指南针。
刷新固件¶
通常情况下,这些电路板在出售时都预装了 betaflight / INav 固件,如果您想使用 ArduPilot,则需要同时更新固件和引导加载器,因为后续的 ArduPilot 固件升级处理需要一个兼容 ArduPilot 的引导加载器。