QioTek Zealot H743¶
备注
4.2 及更高版本固件支持该(飞行)控制器
QioTek Zealot H743 是一款内部减震的(飞行)控制器,采用 CNC 金属保护壳,坚固耐用。它具有全冗余传感器、更多输出、温控 IMU,是首款集成 OSD 芯片的高性能(飞行)控制器。

规格¶
处理器:
MUCU - STM32H743VIT6
16KB 框架 - FM25V01
AT7456E OSD
传感器
陀螺仪/加速度计: - 标准:ICM42688P, ICM20689, ICM40605 - 工业:IIM42652, ICM42688P, ICM20689 - 工业应用版本:ADIS16170、IIM42652、ICM42688P
气压计: 2x DSP310
罗盘QMC5883L
电源
4.1-6.0VDC 来自 USB(仅限内部电路和 RX),或通过 2 个电源模块连接器,或通过内部 BEC 关闭 VBAT 输入引脚。使用 USB、电源模块或 VBAT 输入时,所有 5V 引脚均可供电。
内部 5V、1.5A BEC 可直接与最多 6S LIPO 电池一起使用,为电路板和外围设备提供最大 1.5A 的电源,并通过 BATT2 监控器仅监控电压(建议最大 500ma)。
ADC 监测电路板电压
ADC 监控伺服/输出的电源轨
接口/连接性
14 路 PWM 输出,带独立电源轨,用于外接电源
4 个继电器输出
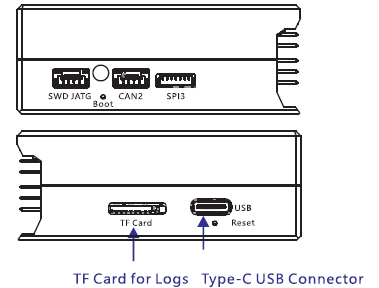
MicroSD 读卡器
通过 JST_GH 连接器连接微型 USB 或远程 USB
内置 RGB LED
摄像机输入和视频输出
外部蜂鸣器接口
2 个 6.6V 容差 ADC 输入,用于 RSSI、模拟空速等。
5 个 UART
2、DroneCAN/CAN 接口
安全开关连接器
尺寸
重量 65 克
尺寸 42 毫米 x 65 毫米 x 25 毫米
连接器针脚分配¶
除非另有说明,所有连接器均为 JST GH
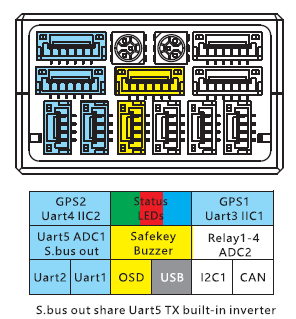
UART1(TELEM1)、UART2(TELEM2)端口¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 | VCC | +5V |
| 2 | TX (OUT) | +3.3V |
| 3 | RX (IN) | +3.3V |
| 4 | 接地 | 接地 |
OSD¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 | VIN | +3.3V |
| 2 | 接地 | 接地 |
| 3 | 接地 | 接地 |
| 4 | VOUT | 3.3V |
USB 远程端口¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 | USB VDD | +5V |
| 2 | 管理部 | +3.3V |
| 3 | DP | +3.3V |
| 4 | 接地 | 接地 |
I2C1 端口¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 | VCC | +5V |
| 2 | SCL1 | +3.3V |
| 3 | SDA1 | +3.3V |
| 4 | 接地 | 接地 |
DroneCAN/CAN 端口¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 | VCC | +5V |
| 2 | CAN_H | +12V |
| 3 | CAN_L | +12V |
| 4 | 接地 | 接地 |
USART5/ADC1/SBus 输出端口¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 | VCC | +5V |
| 2 | TX5 | +3.3V |
| 3 | RX5 | +3.3V |
| 4 | SBUS 输出 | +3.3V |
| 5 | ADC1 | +6V |
| 6 | 接地 | 接地 |
安全/蜂鸣器端口¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 | VCC3.3 | +3.3V |
| 2 | VCC5.5 | +5V |
| 3 | 安全钥匙 | +3.3V |
| 4 | SafLED | +3.3V |
| 5 | BUZZER- | +5V |
| 6 | 接地 | 接地 |
继电器/ADC2 端口¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 | ADC2 | +6V |
| 2 | 继电器1 | +5V |
| 3 | 继电器2 | +5V |
| 4 | 继电器3 | +5V |
| 5 | 继电器4 | +5V |
| 6 | 接地 | 接地 |
USART3(GPS1/I2C1)、UART4(GPS2/I2C2)端口¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 | VCC | +5V |
| 2 | 德克萨斯州 | +3.3V |
| 3 | RX | +3.3V |
| 4 | SCL | +3.3V |
| 5 | SDA | +3.3V |
| 6 | 接地 | 接地 |
电源 1、电源 2 端口¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 | VCC | +5V |
| 2 | VCC | +5V |
| 3 | 当前 | +3.3V |
| 4 | 电压 | +3.3V |
| 5 | 接地 | 接地 |
| 6 | 接地 | 接地 |
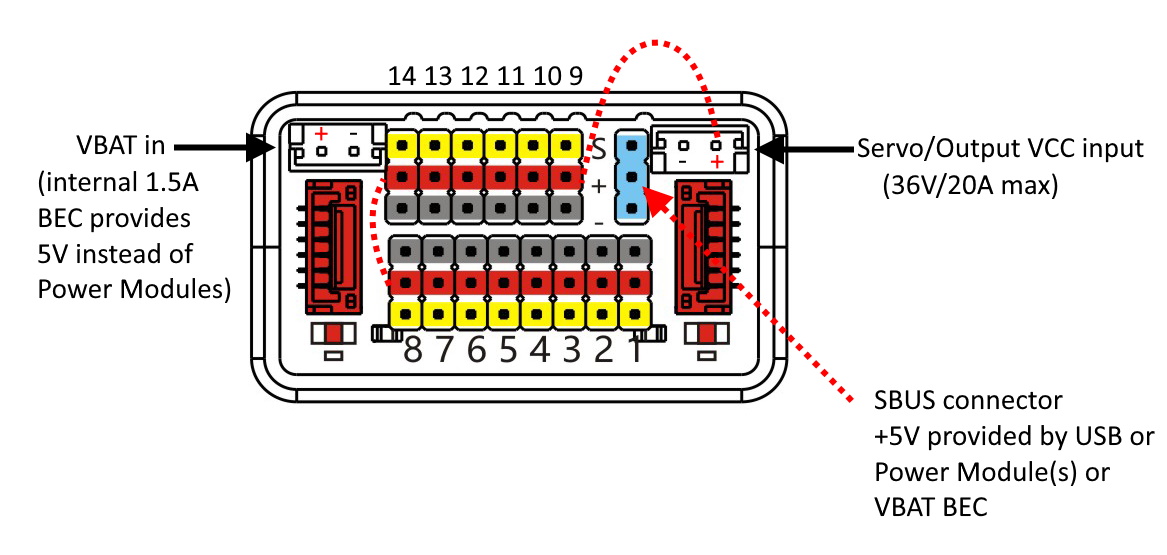
VBAT 输入¶
最大输入电压为 30V。一个 5V 1.5A 的稳压器将此输入电压降至(飞行)控制器使用和供应的 +5V 电压。如果使用电源模块 2 输入,请勿将电源连接至此输入,因为它们共用 BATT2 电压监控电路。该连接器为 JST-EH 型。
SERVO VCC 轨道输入¶
这为通过外部 BEC 或电源为连接到输出连接器块的舵机供电提供了一种方法。最大额定功率为 36V @ 20A。
RC 输入¶
通过将接收器的输出连接到伺服/输出 VCC 输入连接器旁边的 SBUS 输入引脚,可对所有兼容的遥控协议进行解码。请注意,某些协议(如包括遥测在内的 CRSF 或 FPort)需要连接和设置其中一个 UART,而不是该引脚。
默认 UART 顺序¶
SERIAL0 = 控制台 = USB
SERIAL1 = Telemetry1 = USART1
SERIAL2 = Telemetry2 = USART2
serial3 = gps1 = usart3
serial4 = gps2 = uart4
serial5 = user = uart5
Dshot 能力¶
所有电机/伺服输出均可进行 Dshot 和 PWM 操作。然而,输出的 Dshot 和正常 PWM 操作混合使用会受到组的限制,即如果要为组中的某个输出启用 Dshot,则需要将该组中的所有输出都配置为 Dshot,而不是 PWM 输出。在配置为普通伺服/电机输出时,必须相同(PWM 速率或 Dshot)的输出组有1/2, 3/4/13/14, 5/6/7/8, 9/10/11/12.输出 13 和 14 不能支持 Dshot,只能支持 PWM,因此如果 3 和 4 设置为 DShot,则不能使用 13 和 14。
备注
要在输出端 9-14 上使用 BShot 功能,请使用 固件服务器
电池监控器设置¶
这些默认设置应该已经设置。但是,如果丢失或更改了这些设置:
使用这些参数设置启用电池电量监控器 :
BATT_MONITOR =4
然后重新启动。
DroneCAN 能力¶
有 2 个 CAN 端口,可连接两个独立的 CAN 总线输出。每个端口可连接多个 CAN 外围设备。(飞行)控制器随附 CAN 分配器板。请参阅 CAN 总线设置 了解如何在电路板上配置 CAN。