Sky-Drones AIRLink 概览¶
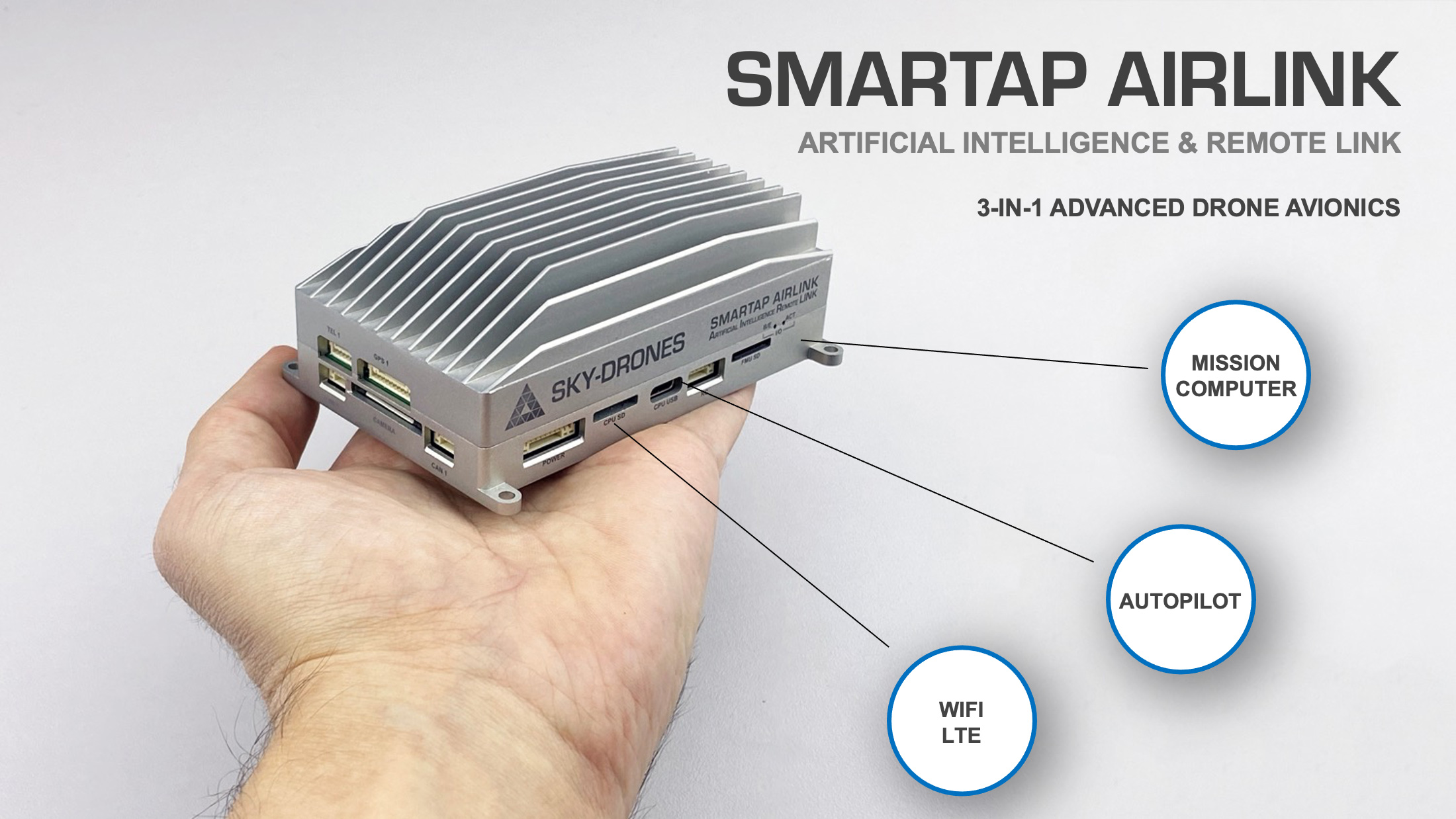
AIRLink 是人工智能与远程链接的缩写。该装置包括最先进的无人机(飞行)控制器、人工智能任务计算机和 LTE 连接装置。AIRLink 有助于将新型无人机制造商的上市时间从数年或数月缩短到数周。
系统功能¶
SmartAP AIRLink 有两台计算机和集成 LTE 模块:
飞行控制计算机((飞行)控制器)有一个三冗余减震和温度稳定的 IMU。
强大的人工智能任务计算机可实现先进的无人机软件功能,如计算机视觉和避障、数字高清视频流和有效载荷数据流。
LTE 和 WiFi 连接模块可提供永久性宽带互联网连接,为远程工作流程提供便利。
特色亮点
规格¶
传感器
3x 加速计、3x 陀螺仪、3x 磁力计、3x 压力传感器s
全球导航卫星系统、测距仪、激光雷达、光流、摄像头
3x 冗余 IMU
减震
温度稳定
飞行控制器
STM32F7,ARM Cortex M7,带 FPU,216 MHz,2 MB 闪存,512 kB RAM
STM32F1,输入/输出协处理器
以太网,10/100 Mbps
局域网与人工智能任务计算机
8x UART:遥测 1、遥测 2(人工智能任务计算机)、遥测 3、GPS 1、GPS 2、额外 UART、串行调试控制台、IO
2x CAN:CAN1、CAN2
带 MAVLink 的 USB
用于调试的串行控制台
RC 输入、SBUS 输入、RSSI 输入、PPM 输入
16x PWM 伺服输出(8 个来自 IO,8 个来自 FMU)
3 个 I2C 端口
高功率压电蜂鸣器驱动器
高功率 RGB LED
安全开关/LED 选件
人工智能任务计算机
6 核 CPU:双核 Cortex-A72 + 四核 Cortex-A53
图形处理器 Mali-T864,OpenGL ES1.1/2.0/3.0/3.1
带 4K VP8/9、4K 10 位 H265/H264 60fps 解码功能的 VPU
远程电源控制、软件复位、关机、RTC 唤醒、睡眠模式
双通道 4GB LPDDR4 内存
16GB eMMC
最高 256GB 的 MicroSD
以太网 10/100/1000 本地千兆位
WiFi 802.11a/b/g/n/ac,蓝牙
USB 3.0 C 型
2x 视频:4 通道 MIPI CSI(FPV 摄像机)和带 HMDI 输入的 4 通道 MIPI CSI(有效载荷摄像机)
LTE 连接模块
4G LTE IMTS/HSPA(+),GSM/GPRS/EDGE
1x 外部插槽,1x 集成 eSIM 卡
LTE 天线,2x2 MIMO
乐队欧洲、北美、澳大利亚、日本、其他地区
设置内容¶
SmartAP AIRLink 套件包括设置系统和准备飞行所需的一切。标准套装包括
1x AIRLink Enterprise 设备
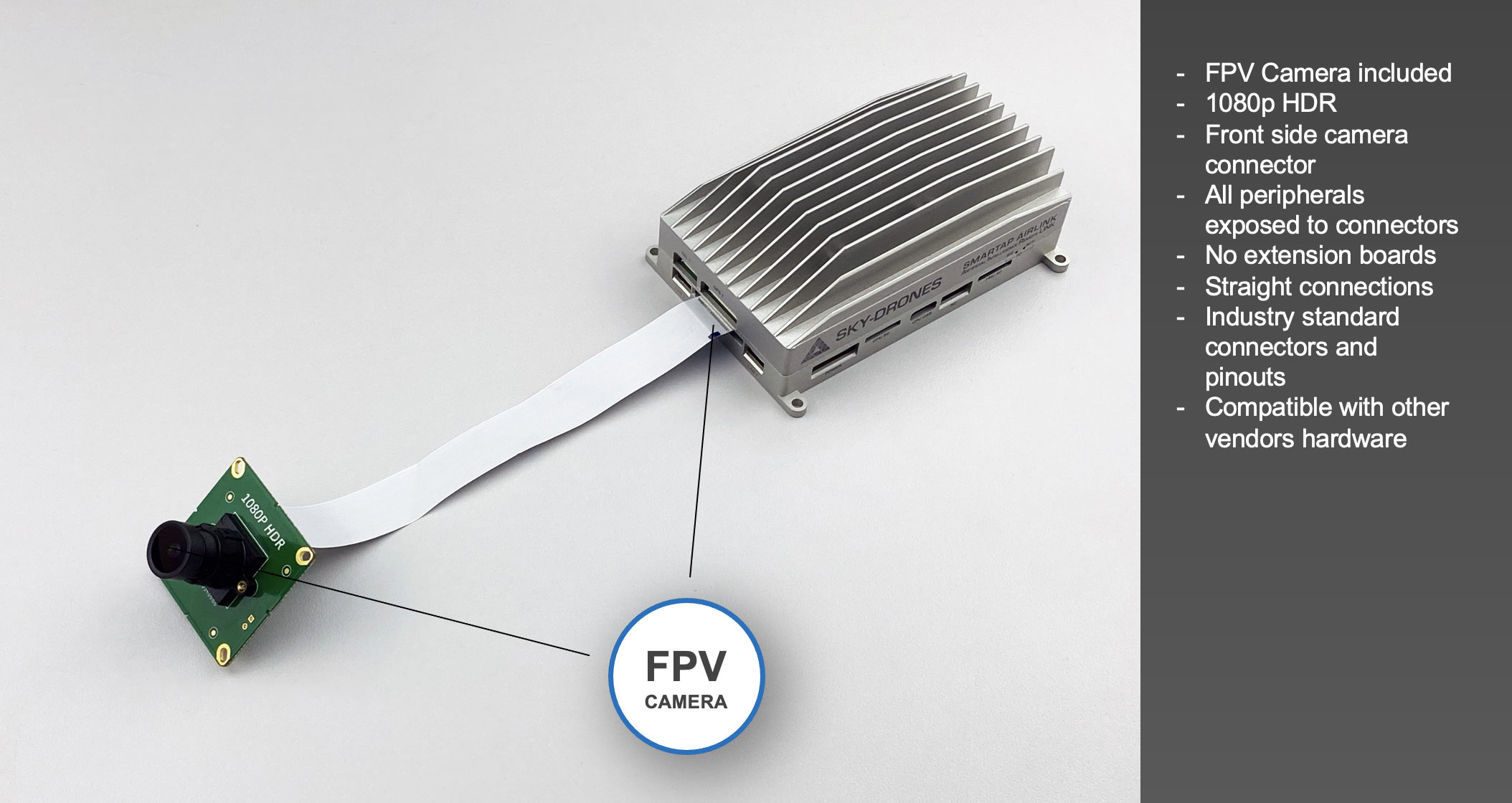
1x FPV 摄像机,带 CSI 电缆
1x 带 MMCX 连接器的 WiFi 天线
2x LTE 天线,带 MMCX 连接器
1x HDMI 转 mini HDMI 连接线1x 连接线套件(7 条连接线,适用于所有连接器)
AIRLink 遥测技术 基于 Microhard LAN/IP 的射频微模块作为附加组件提供,与 AIRLink 完全兼容。
版本¶
AIRLink 版本提供无人机制造商所需的不同集成级别:企业版和核心版。AIRLink 企业版是快速启动、评估和原型设计的理想选择,而核心版则针对深度集成和中大批量生产进行了优化。
AIRLink 企业

SmartAP AIRLink 的企业版适用于原型开发和中小批量无人机生产。通过专用安装孔和集成散热片,安装快捷方便。
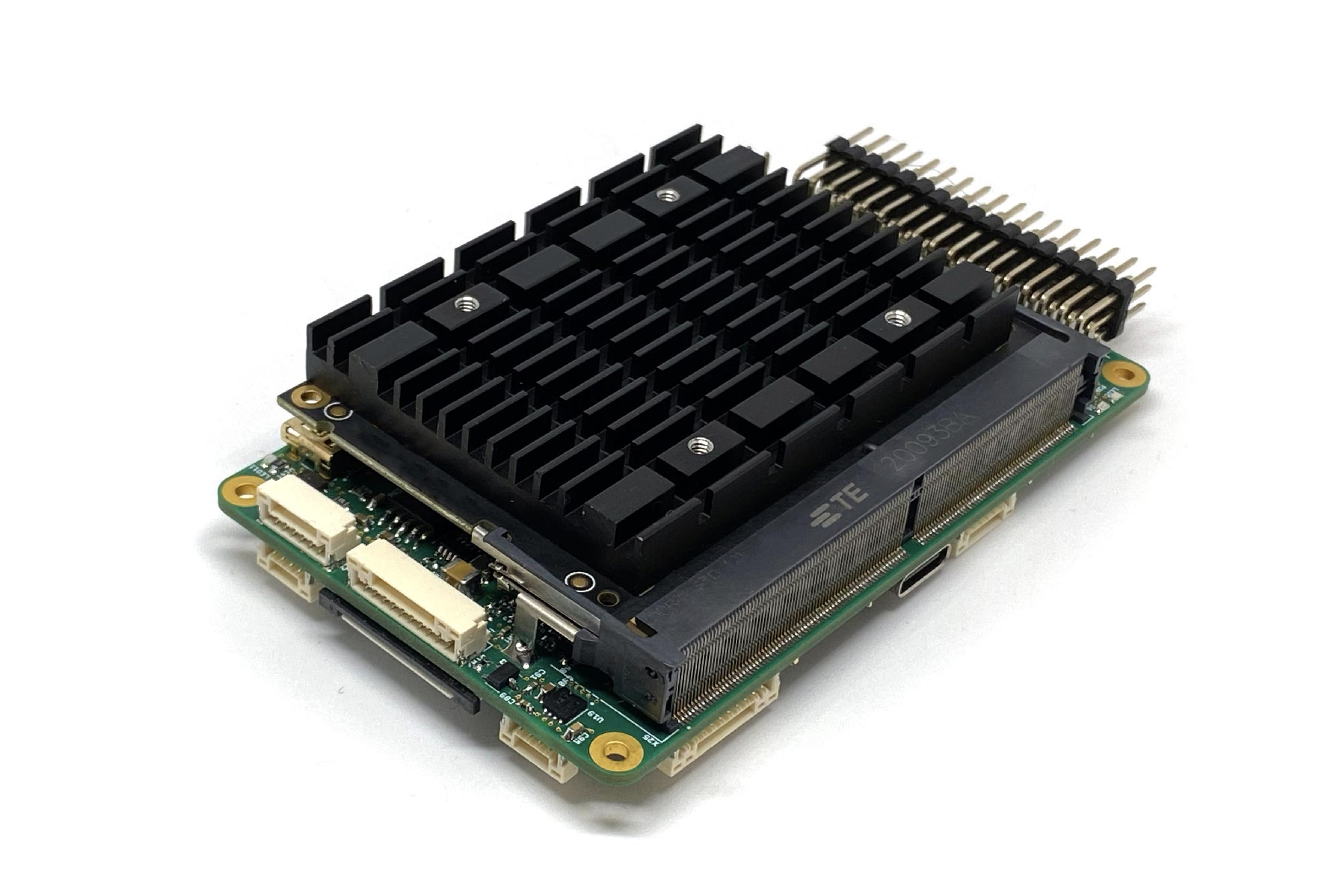
AIRLink 核心
SmartAP AIRLink 的核心版适用于中大批量生产以及与客户硬件的深度集成。它仅重 89 克,可安装在金属框架上,以达到最佳散热效果。
| 参数 | AIRLink 企业 | AIRLink 核心 |
|---|---|---|
| 附文 | 铝质,带集成散热片和风扇安装选项。 | 设计应提供外部散热片或合理的功率耗散。 |
| 尺寸 | 长 103 x 宽 61 x 高 37 毫米 | 长 100 x 宽 57 x 高 22 毫米 |
| 重量 | 198 g | 89 g |
| 环境温度 | -40°C-...+50°C | -40°C-...+50°C |
特点¶
易于安装

标配 FPV 摄像机
接口¶
左侧
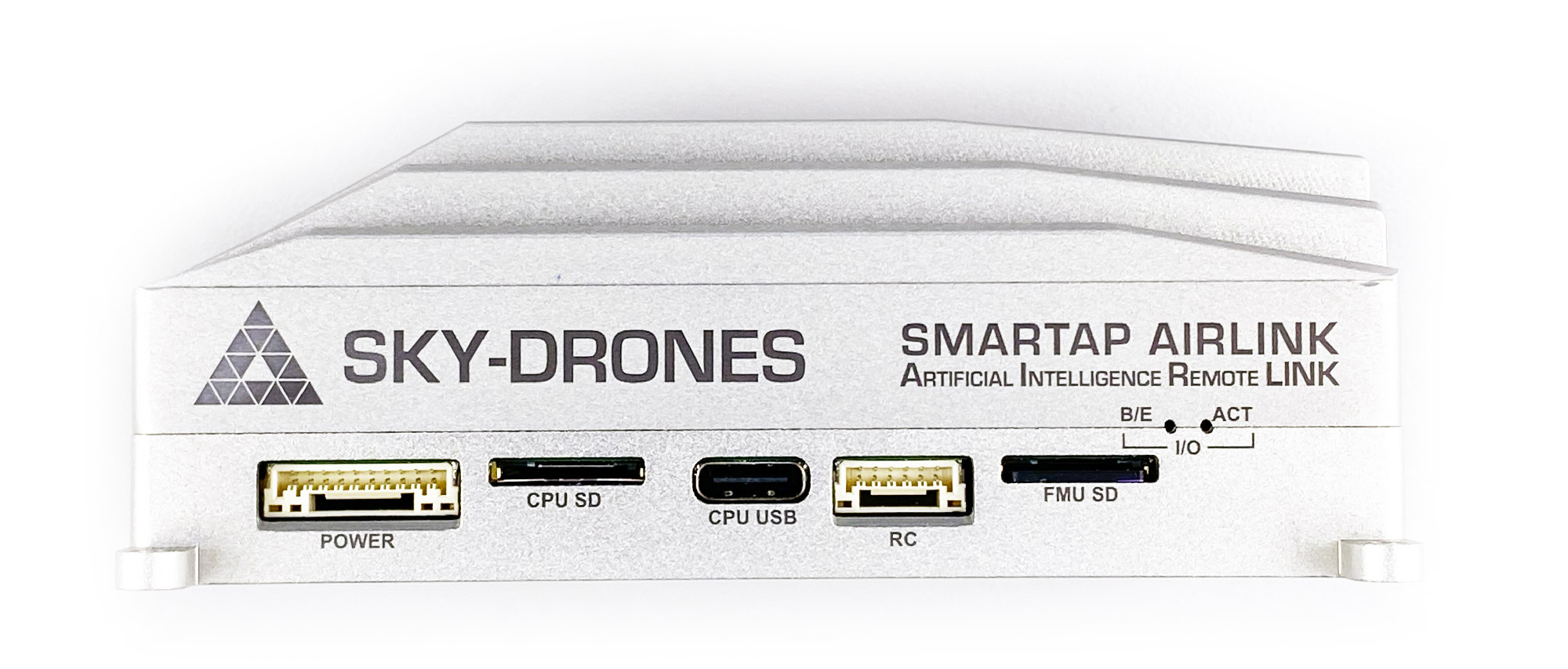
左侧接口:
带电压和放大器的电源输入;电流监控
人工智能任务计算机微型 SD 卡
飞行控制器微型 SD 卡
人工智能任务计算机 USB Type-C
PPM 输入、SBUS 输出、RSSI 监测器
电源 - JST GH SM10B-GHS-TB
| 针脚编号 | 针脚名称 | 方向 | 电压 | 功能 |
|---|---|---|---|---|
| 1 | 12V | IN | +12V | 主电源输入 |
| 2 | 12V | IN | +12V | 主电源输入 |
| 3 | 12V | IN | +12V | 主电源输入 |
| 4 | BAT_CURRENT | IN | +3.3V | 电池电流监控 |
| 5 | BAT_VOLTAGE | IN | +3.3V | 电池电压监控 |
| 6 | 3V3 | 出局 | +3.3V | 3.3V 输出 |
| 7 | PWR_KEY | IN | +3.3V | 电源键输入 |
| 8 | 接地 | 地面 | ||
| 9 | 接地 | 地面 | ||
| 10 | 接地 | 地面 |
CPU SD 卡 - microSD
CPU USB - USB C 型
遥控连接器 - JST GH SM06B-GHS-TB
| 针脚编号 | 针脚名称 | 方向 | 电压 | 功能 |
|---|---|---|---|---|
| 1 | 5V | 出局 | +5V | 5V 输出 |
| 2 | PPM_IN | IN | +3.3V | PPM 输入 |
| 3 | RSSI_IN | IN | +3.3V | RSSI 输入 |
| 4 | 风扇输出 | 出局 | +5V | 风扇输出 |
| 5 | SBUS_OUT | 出局 | +3.3V | SBUS 输出 |
| 6 | 接地 | 地面 |
FMU SD 卡 - microSD
右侧
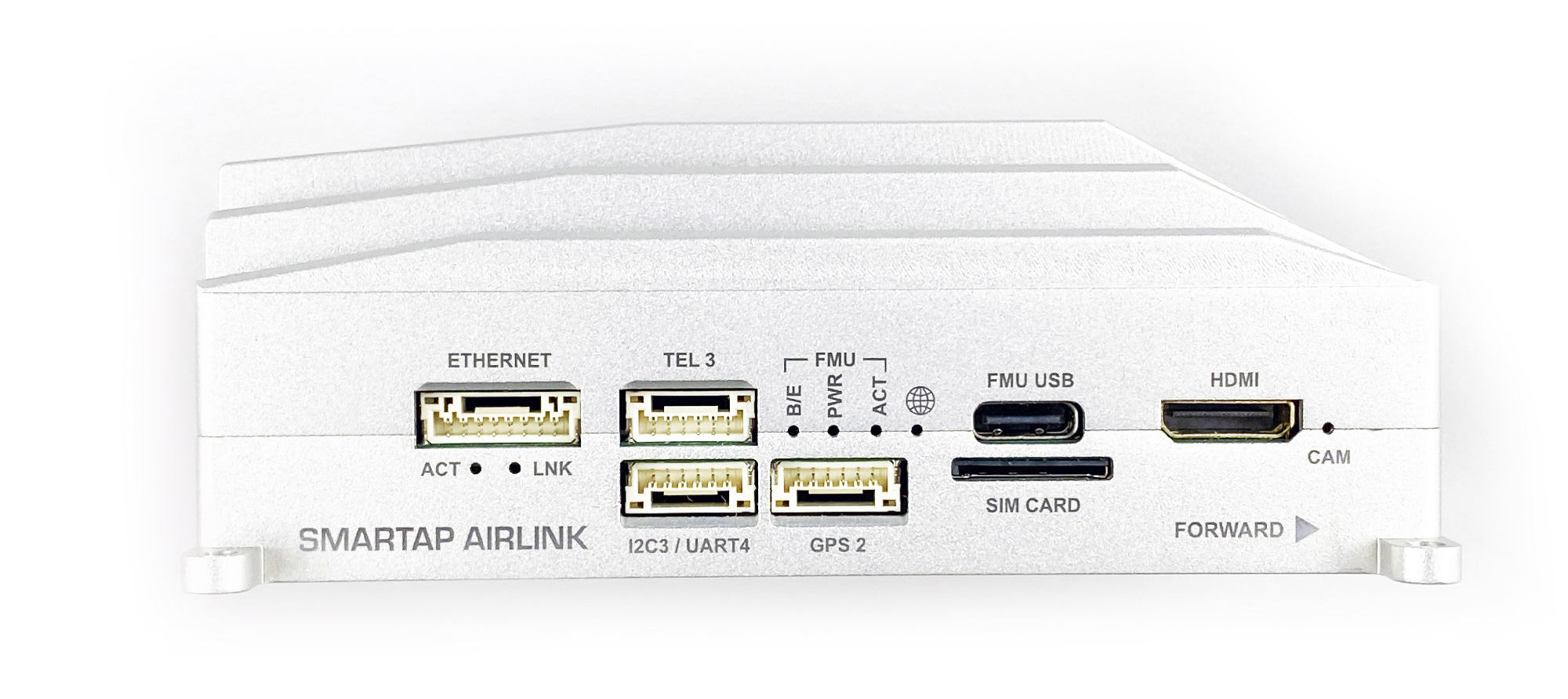
右侧接口:
带电源输出的以太网端口
遥测端口
第二个 GPS 端口
备用 I2C / UART 端口
飞行控制器 USB Type-C
微型 SIM 卡
HDMI 输入端口(有效载荷摄像机)
以太网 - JST GH SM08B-GHS-TB
| 针脚编号 | 针脚名称 | 方向 | 电压 | 功能 |
|---|---|---|---|---|
| 1 | 5V | 出局 | +5V | 无线电模块电源 |
| 2 | 5V | 出局 | +5V | 无线电模块电源 |
| 3 | ETH_TXP | 出局 | +3.3V | 以太网正向传输 |
| 4 | ETH_TXN | 出局 | +3.3V | 以太网传输负 |
| 5 | ETH_RXP | IN | +3.3V | 以太网接收正面 |
| 6 | ETH_RXN | IN | +3.3V | 以太网接收负 |
| 7 | 接地 | 地面 | ||
| 8 | 接地 | 地面 |
tel3 - JST GH SM06B-GHS-TB
| 针脚编号 | 针脚名称 | 方向 | 电压 | 功能 |
|---|---|---|---|---|
| 1 | 5V | 出局 | +5V | 电源输出 |
| 2 | USART2_TX | 出局 | +3.3V | 遥测 3 TX |
| 3 | USART2_RX | IN | +3.3V | 遥测 3 RX |
| 4 | USART2_CTS | IN | +3.3V | 遥测 3 CTS |
| 5 | USART2_RTS | 出局 | +3.3V | 遥测 3 RTS |
| 6 | 接地 | 地面 |
i2c3 / uart4 - jst gh sm06b-ghs-tb
| 针脚编号 | 针脚名称 | 方向 | 电压 | 功能 |
|---|---|---|---|---|
| 1 | 5V | 出局 | +5V | 电源输出 |
| 2 | USART4_TX | 出局 | +3.3V | UART 4 TX |
| 3 | USART4_RX | IN | +3.3V | UART 4 RX |
| 4 | I2C3_SCL | 输入/输出 | +3.3V | I2C3 时钟 |
| 5 | I2C3_SDA | 输入/输出 | +3.3V | I2C3 数据 |
| 6 | 接地 | 地面 |
GPS2 - JST GH SM06B-GHS-TB
| 针脚编号 | 针脚名称 | 方向 | 电压 | 功能 |
|---|---|---|---|---|
| 1 | 5V | 出局 | +5V | 电源输出 |
| 2 | USART8_TX | 出局 | +3.3V | UART 8 TX |
| 3 | USART8_RX | IN | +3.3V | UART 8 RX |
| 4 | I2C2_SCL | 输入/输出 | +3.3V | I2C2 时钟 |
| 5 | I2C2_SDA | 输入/输出 | +3.3V | I2C2 数据 |
| 6 | 接地 | 地面 |
FMU USB - USB C 型
SIM 卡 - micro SIM 卡
HDMI - mini HDMI
正面
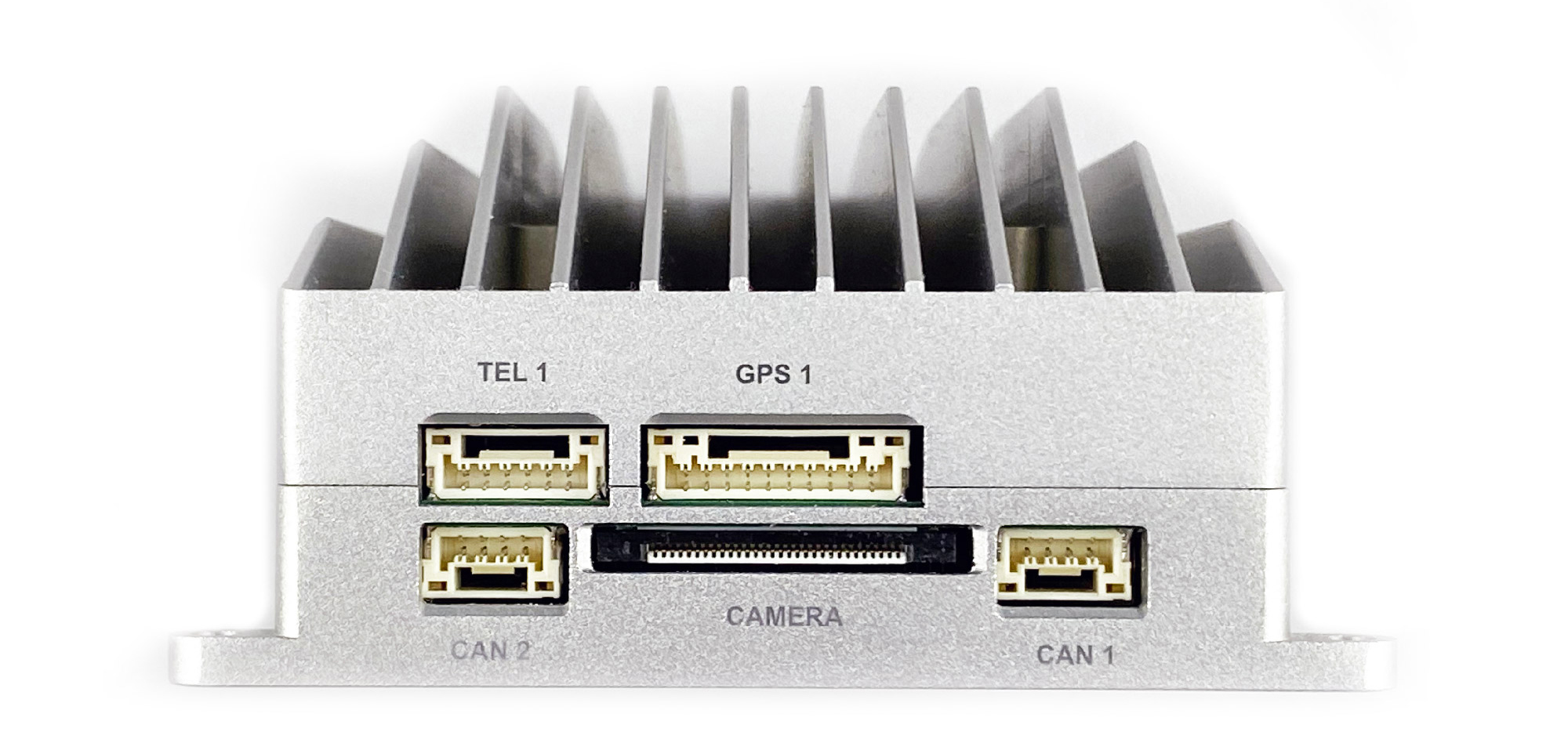
正面接口:
全球导航卫星系统和指南针主端口
主遥测端口
CSI 摄像机输入
CAN 1
CAN 2
tel1 - JST GH SM06B-GHS-TB
| 针脚编号 | 针脚名称 | 方向 | 电压 | 功能 |
|---|---|---|---|---|
| 1 | 5V | 出局 | +5V | 电源输出 |
| 2 | USART7_TX | 出局 | +3.3V | 遥测 1 TX |
| 3 | USART7_RX | IN | +3.3V | 遥测 1 RX |
| 4 | USART7_CTS | IN | +3.3V | 遥测 1 CTS |
| 5 | USART7_RTS | 出局 | +3.3V | 遥测 1 RTS |
| 6 | 接地 | 地面 |
GPS1 - JST GH SM10B-GHS-TB
| 针脚编号 | 针脚名称 | 方向 | 电压 | 功能 |
|---|---|---|---|---|
| 1 | 5V | 出局 | +5V | 电源输出 |
| 2 | USART1_TX | 出局 | +3.3V | GPS 1 TX |
| 3 | USART1_RX | IN | +3.3V | GPS 1 RX |
| 4 | I2C1_SCL | 输入/输出 | +3.3V | Mag 1 时钟 |
| 5 | I2C1_SDA | 输入/输出 | +3.3V | 磁 1 数据 |
| 6 | 安全_BTN | IN | +3.3V | 安全按钮 |
| 7 | 安全指示灯 | 出局 | +3.3V | 安全 LED |
| 8 | +3V3 | 出局 | +3.3V | 3.3V 输出 |
| 9 | 蜂鸣器 | 出局 | +5V | 蜂鸣器输出 |
| 10 | 接地 | 地面 |
CAN1 - JST GH SM04B-GHS-TB
| 针脚编号 | 针脚名称 | 方向 | 电压 | 功能 |
|---|---|---|---|---|
| 1 | 5V | 出局 | +5V | 电源输出 |
| 2 | CAN1_H | 输入/输出 | +5V | CAN 1 高 (120Ω) |
| 3 | CAN1_L | 输入/输出 | +5V | CAN 1 低 (120Ω) |
| 4 | 接地 | 地面 |
CAN2 - JST GH SM04B-GHS-TB
| 针脚编号 | 针脚名称 | 方向 | 电压 | 功能 |
|---|---|---|---|---|
| 1 | 5V | 出局 | +5V | 电源输出 |
| 2 | CAN2_H | 输入/输出 | +5V | CAN 2 高 (120Ω) |
| 3 | CAN2_L | 输入/输出 | +5V | CAN 2 低 (120Ω) |
| 4 | 接地 | 地面 |
摄像头 - FPC 30 引脚,0.5 毫米间距
后侧
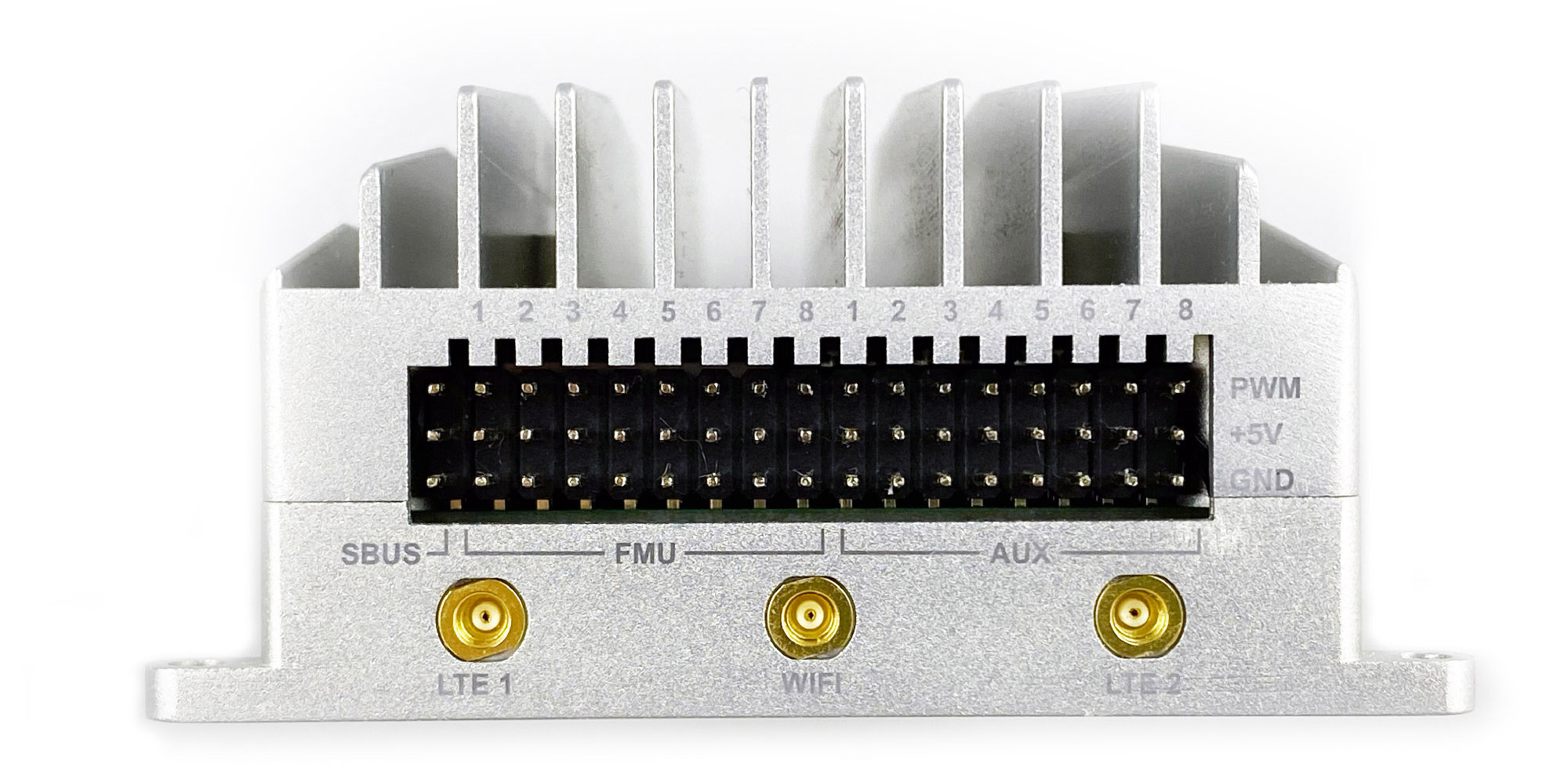
后侧接口:
SBUS 输入
16 个 PWM 输出通道
2 个 LTE 天线插座(MIMO)
WiFi 天线插座(AP & 站模式)
UART 订购¶
AIRLink 有大量内部和外部串行端口:
| 串行 | UART | 功能 |
|---|---|---|
| 序列 0 | USB | 控制台 |
| 序号 1 | UART 7 | 遥测 1 |
| 序号 2 | UART 5 | 遥测 2(内部与任务计算机一起使用) |
| 序号 3 | USART 1 | GPS 1 |
| 序号 4 | UART 8 | GPS 2 |
| 序号 5 | USART 3 | 调试控制台(内部连接器) |
| 序号 6 | USART 2 | 遥测 3 |
| 序号 7 | UART 4 | 外部 UART |
RC 输入¶
RC 输入配置在 SBUS 引脚上,通过内部变频器连接到 IO MCU。对于 PPM 接收器,请使用位于设备左侧的 RC 连接器 PPM 引脚。
输出¶
AIRLink 有 16 个 PWM 输出端。主输出 1-8 连接到 IO MCU。辅助输出 1-8 连接到 FMU。
| 输出 | 计时器 | 频道 |
|---|---|---|
| 辅助 1 | 计时器 1 | 第四频道 |
| 辅助 2 | 计时器 1 | 第 3 频道 |
| 辅助 3 | 计时器 1 | 频道 2 |
| 辅助 4 | 计时器 1 | 频道 1 |
| 辅助 5 | 计时器 4 | 频道 2 |
| 辅助 6 | 计时器 4 | 第 3 频道 |
| 辅助 7 | 计时器 12 | 频道 1 |
| 辅助 8 | 计时器 12 | 频道 2 |
DShot 功能可用于前四个 AUX 引脚。
更多信息¶
有关设置和使用 AIRLink 系统的更多信息和说明,请参见 AIRLink 文档
如需技术帮助、支持和定制,请通过以下方式联系我们 Sky-Drones 联系页面
更多信息请访问 www.sky-drones.com
常见问题的解答 常见问题
参考设计¶
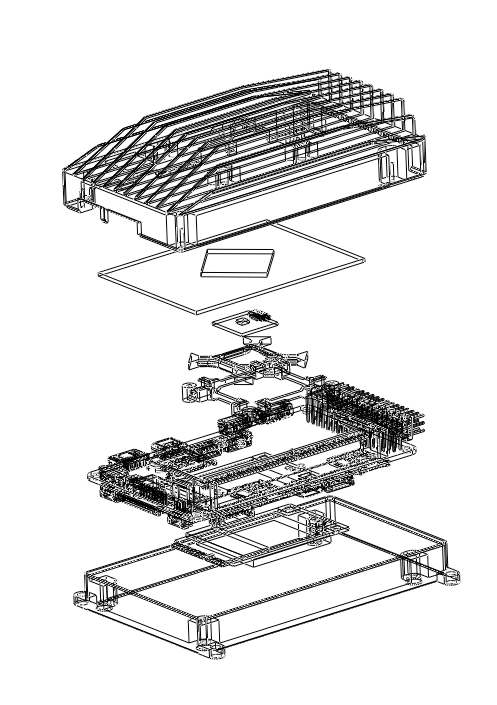
提供 AIRLink CAD 模型 这里.
可应要求提供 AIRLink 参考设计。请联系 Sky-Drones 联系页面
固件¶
可找到 AIRLink 的固件 这里 在标有 "AIRLink "的子文件夹中。
购买地点¶
从 Sky-Drones Store 购买 这里.
全球送货,订单处理时间为 1-2 天
分销商信息即将发布